 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-PANTHER: Learning-Based Perception-Aware Trajectory Planner in Dynamic Environments
Paper and Code
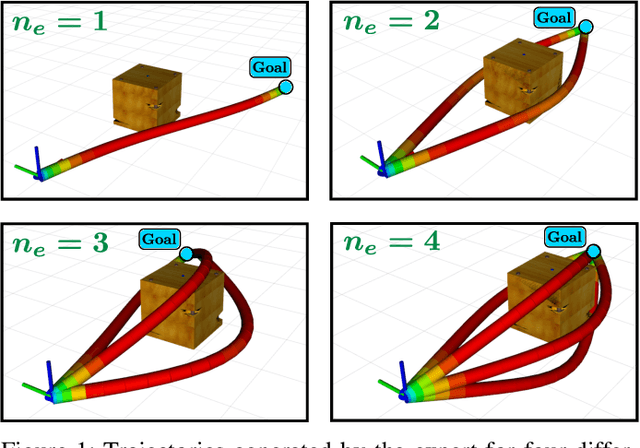
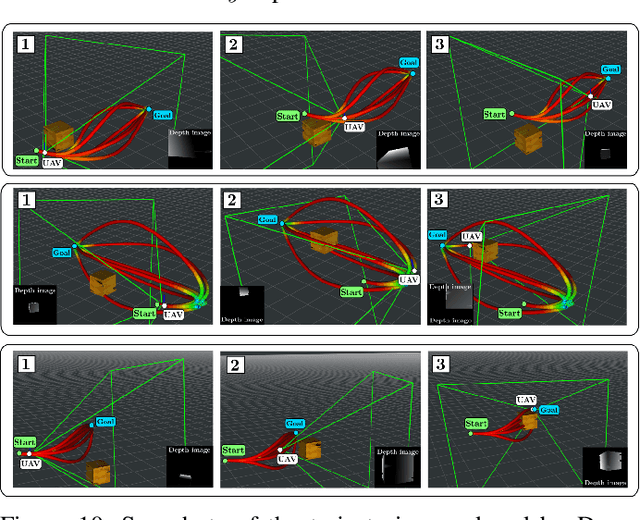
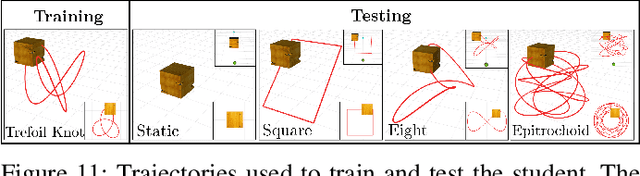
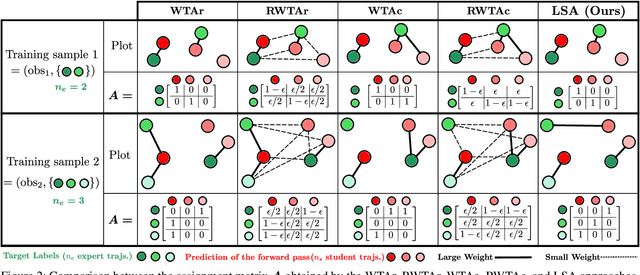
This paper presents Deep-PANTHER, a learning-based perception-aware trajectory planner for unmanned aerial vehicles (UAVs) in dynamic environments. Given the current state of the UAV, and the predicted trajectory and size of the obstacle, Deep-PANTHER generates multiple trajectories to avoid a dynamic obstacle while simultaneously maximizing its presence in the field of view (FOV) of the onboard camera. To obtain a computationally tractable real-time solution, imitation learning is leveraged to train a Deep-PANTHER policy using demonstrations provided by a multimodal optimization-based expert. Extensive simulations show replanning times that are two orders of magnitude faster than the optimization-based expert, while achieving a similar cost. By ensuring that each expert trajectory is assigned to one distinct student trajectory in the loss function, Deep-PANTHER can also capture the multimodality of the problem and achieve a mean squared error (MSE) loss with respect to the expert that is up to 18 times smaller than state-of-the-art (Relaxed) Winner-Takes-All approaches. Deep-PANTHER is also shown to generalize well to obstacle trajectories that differ from the ones used in training.