 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Multi-Task Learning for Anomalous Driving Detection Using CAN Bus Scalar Sensor Data
Paper and Code
Jun 28, 2019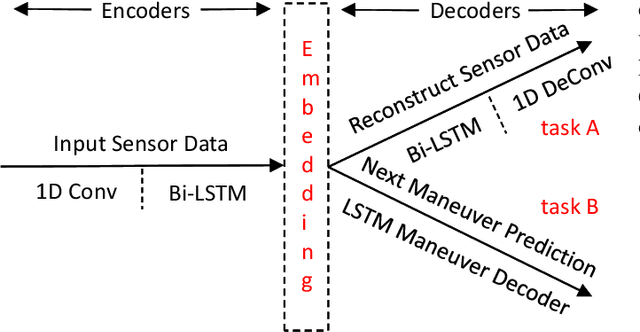
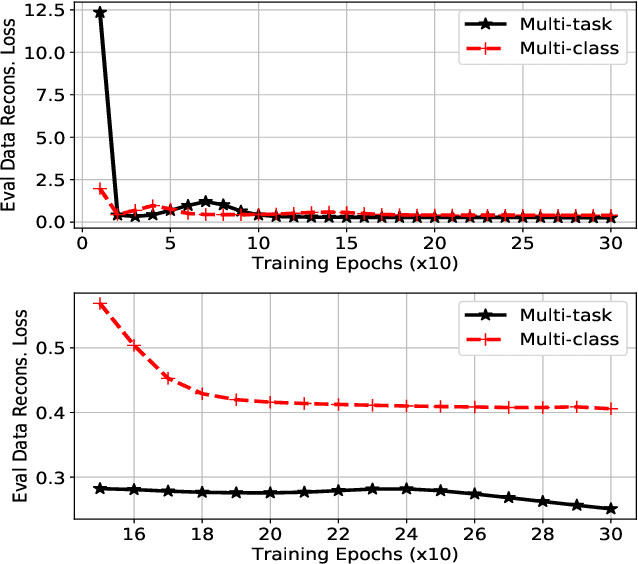
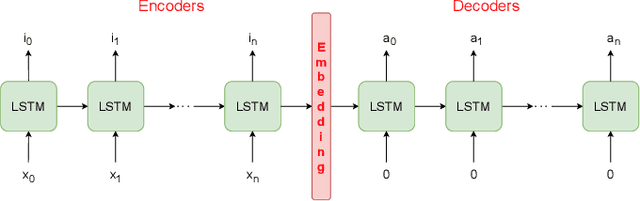
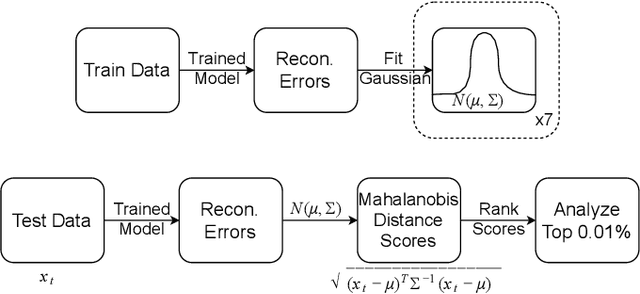
Corner cases are the main bottlenecks when applying Artificial Intelligence (AI) systems to safety-critical applications. An AI system should be intelligent enough to detect such situations so that system developers can prepare for subsequent planning. In this paper, we propose semi-supervised anomaly detection considering the imbalance of normal situations. In particular, driving data consists of multiple positive/normal situations (e.g., right turn, going straight), some of which (e.g., U-turn) could be as rare as anomalous situations. Existing machine learning based anomaly detection approaches do not fare sufficiently well when applied to such imbalanced data. In this paper, we present a novel multi-task learning based approach that leverages domain-knowledge (maneuver labels) for anomaly detection in driving data. We evaluate the proposed approach both quantitatively and qualitatively on 150 hours of real-world driving data and show improved performance over baseline approaches.