 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Imitation Learning for Autonomous Driving in Generic Urban Scenarios with Enhanced Safety
Paper and Code
Mar 02, 2019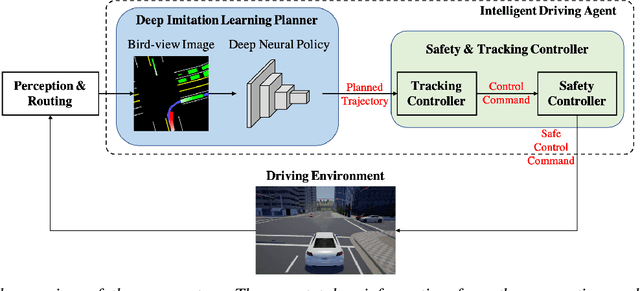
The decision and planning system for autonomous driving in urban environments is hard to design. Most current methods are to manually design the driving policy, which can be sub-optimal and expensive to develop and maintain at scale. Instead, with imitation learning we only need to collect data and then the computer will learn and improve the driving policy automatically. However, existing imitation learning methods for autonomous driving are hardly performing well for complex urban scenarios. Moreover, the safety is not guaranteed when we use a deep neural network policy. In this paper, we proposed a framework to learn the driving policy in urban scenarios efficiently given offline connected driving data, with a safety controller incorporated to guarantee safety at test time. The experiments show that our method can achieve high performance in realistic three-dimensional simulations of urban driving scenarios, with only hours of data collection and training on a single consumer GPU.