Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Convolutional Neural Network for 6-DOF Image Localization
Paper and Code
Nov 08, 2016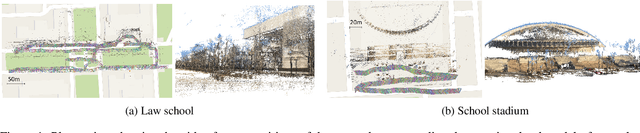
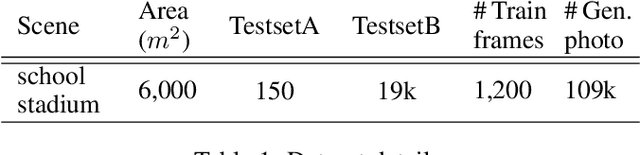
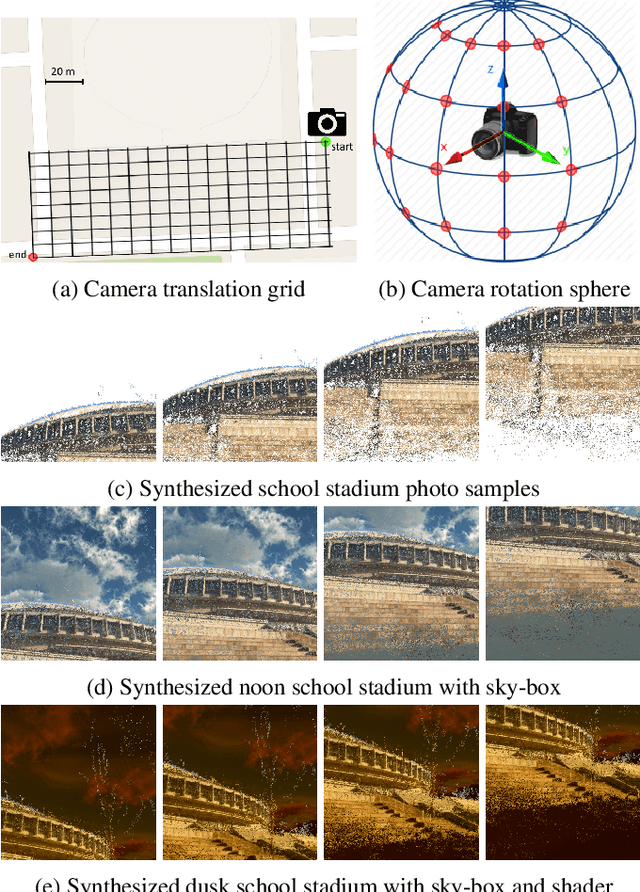

We present an accurate and robust method for six degree of freedom image localization. There are two key-points of our method, 1. automatic immense photo synthesis and labeling from point cloud model and, 2. pose estimation with deep convolutional neural networks regression. Our model can directly regresses 6-DOF camera poses from images, accurately describing where and how it was captured. We achieved an accuracy within 1 meters and 1 degree on our out-door dataset, which covers about 2 acres on our school campus.
* will update soon
View paper on