 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Convolutional Likelihood Particle Filter for Visual Tracking
Paper and Code
Jun 11, 2020
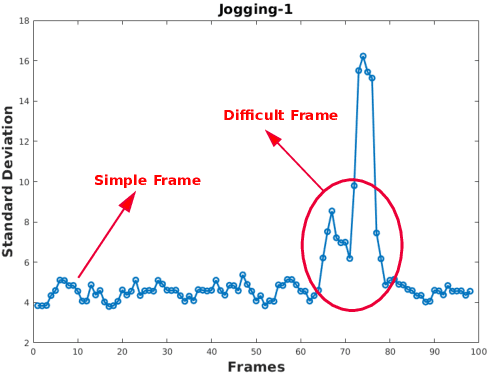

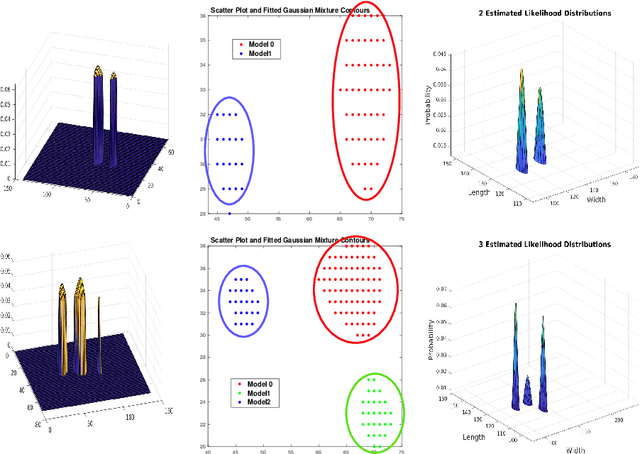
We propose a novel particle filter for convolutional-correlation visual trackers. Our method uses correlation response maps to estimate likelihood distributions and employs these likelihoods as proposal densities to sample particles. Likelihood distributions are more reliable than proposal densities based on target transition distributions because correlation response maps provide additional information regarding the target's location. Additionally, our particle filter searches for multiple modes in the likelihood distribution, which improves performance in target occlusion scenarios while decreasing computational costs by more efficiently sampling particles. In other challenging scenarios such as those involving motion blur, where only one mode is present but a larger search area may be necessary, our particle filter allows for the variance of the likelihood distribution to increase. We tested our algorithm on the Visual Tracker Benchmark v1.1 (OTB100) and our experimental results demonstrate that our framework outperforms state-of-the-art methods.