Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Convolutional Compressed Sensing for LiDAR Depth Completion
Paper and Code
Mar 23, 2018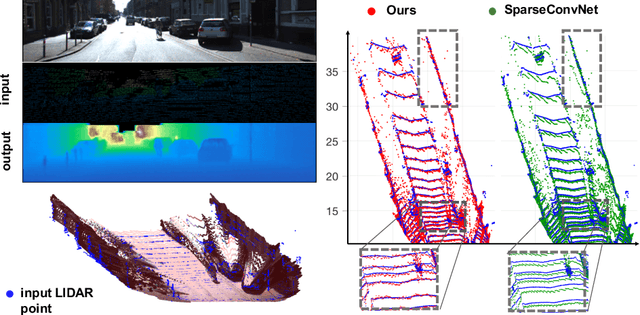
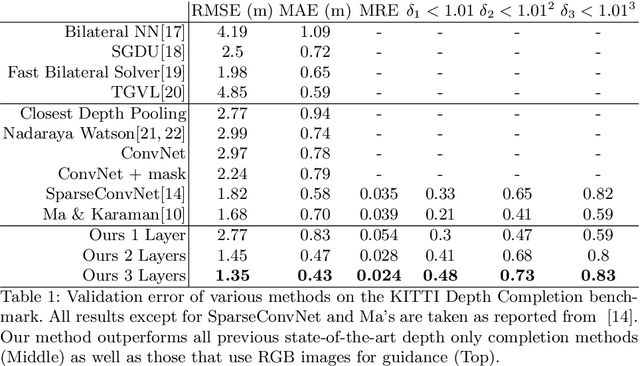
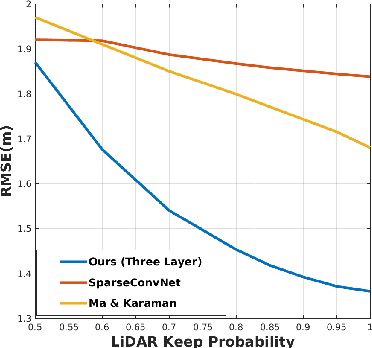
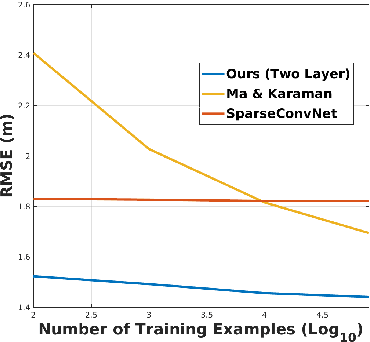
In this paper we consider the problem of estimating a dense depth map from a set of sparse LiDAR points. We use techniques from compressed sensing and the recently developed Alternating Direction Neural Networks (ADNNs) to create a deep recurrent auto-encoder for this task. Our architecture internally performs an algorithm for extracting multi-level convolutional sparse codes from the input which are then used to make a prediction. Our results demonstrate that with only two layers and 1800 parameters we are able to out perform all previously published results, including deep networks with orders of magnitude more parameters.
View paper on