Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Convolutional Autoencoder for Assessment of Anomalies in Multi-stream Sensor Data
Paper and Code
Feb 15, 2022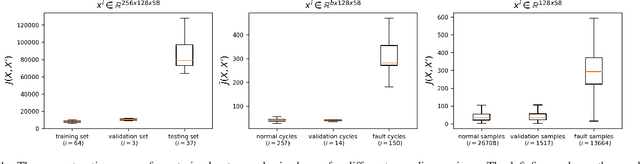
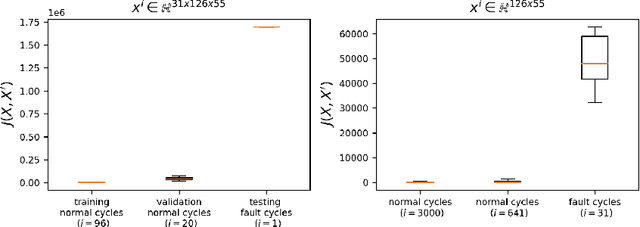
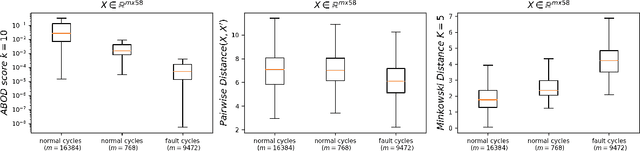
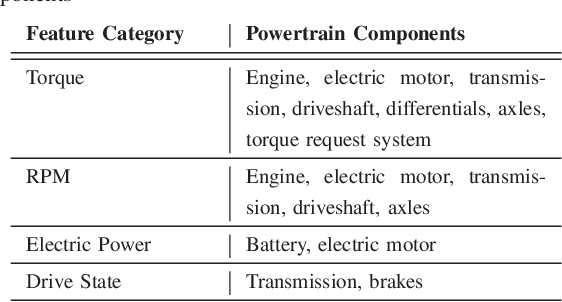
A fully convolutional autoencoder is developed for the detection of anomalies in multi-sensor vehicle drive-cycle data from the powertrain domain. Preliminary results collected on real-world powertrain data show that the reconstruction error of faulty drive cycles deviates significantly relative to the reconstruction of healthy drive cycles using the trained autoencoder. The results demonstrate applicability for identifying faulty drive-cycles, and for improving the accuracy of system prognosis and predictive maintenance in connected vehicles.
* 7 pages, 4 figures, IEEE
View paper on