 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecomposing the Enigma: Subgoal-based Demonstration Learning for Formal Theorem Proving
Paper and Code
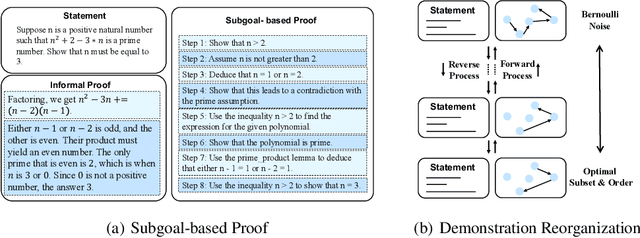



Large language models~(LLMs) present an intriguing avenue of exploration in the domain of formal theorem proving. Nonetheless, the full utilization of these models, particularly in terms of demonstration formatting and organization, remains an underexplored area. In an endeavor to enhance the efficacy of LLMs, we introduce a subgoal-based demonstration learning framework, consisting of two primary elements: Firstly, drawing upon the insights of subgoal learning from the domains of reinforcement learning and robotics, we propose the construction of distinct subgoals for each demonstration example and refine these subgoals in accordance with the pertinent theories of subgoal learning. Secondly, we build upon recent advances in diffusion models to predict the optimal organization, simultaneously addressing two intricate issues that persist within the domain of demonstration organization: subset selection and order determination. Through the integration of subgoal-based learning methodologies, we have successfully increased the prevailing proof accuracy from 38.9\% to 44.3\% on the miniF2F benchmark. Furthermore, the adoption of diffusion models for demonstration organization can lead to an additional enhancement in accuracy to 45.5\%, or a $5\times$ improvement in sampling efficiency compared with the long-standing state-of-the-art method. Our code is available at \url{https://github.com/HKUNLP/subgoal-theorem-prover}.