 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Theoretic Approaches for Robotic Environmental Monitoring -- A Survey
Paper and Code
Aug 04, 2023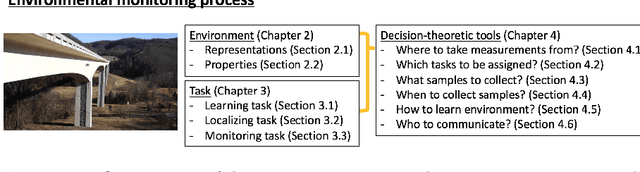
Robotics has dramatically increased our ability to gather data about our environments. This is an opportune time for the robotics and algorithms community to come together to contribute novel solutions to pressing environmental monitoring problems. In order to do so, it is useful to consider a taxonomy of problems and methods in this realm. We present the first comprehensive summary of decision theoretic approaches that are enabling efficient sampling of various kinds of environmental processes. Representations for different kinds of environments are explored, followed by a discussion of tasks of interest such as learning, localization, or monitoring. Finally, various algorithms to carry out these tasks are presented, along with a few illustrative prior results from the community.