 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDAVE Aquatic Virtual Environment: Toward a General Underwater Robotics Simulator
Paper and Code
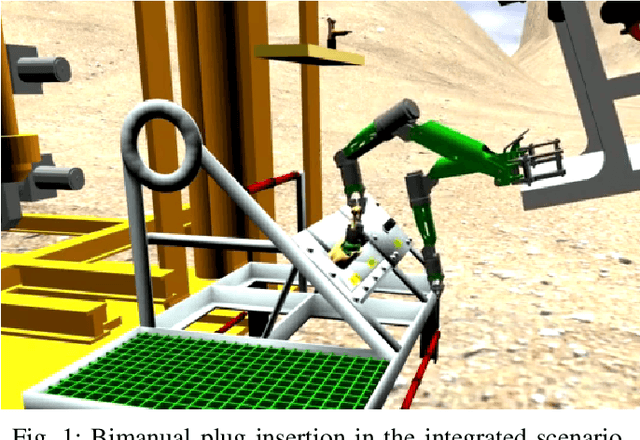
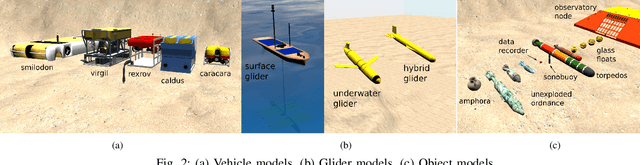
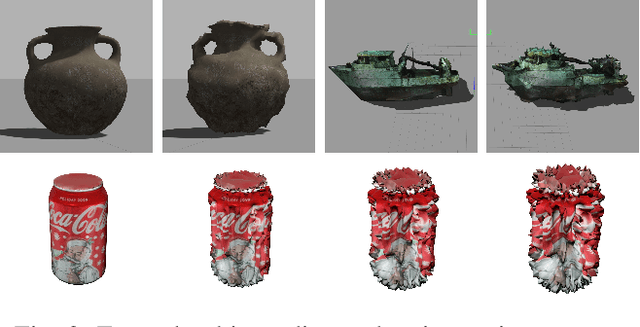
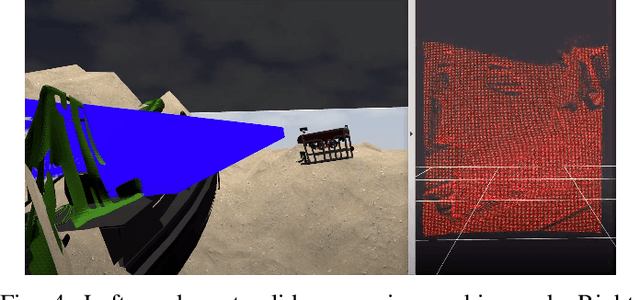
We present DAVE Aquatic Virtual Environment (DAVE), an open source simulation stack for underwater robots, sensors, and environments. Conventional robotics simulators are not designed to address unique challenges that come with the marine environment, including but not limited to environment conditions that vary spatially and temporally, impaired or challenging perception, and the unavailability of data in a generally unexplored environment. Given the variety of sensors and platforms, wheels are often reinvented for specific use cases that inevitably resist wider adoption. Building on existing simulators, we provide a framework to help speed up the development and evaluation of algorithms that would otherwise require expensive and time-consuming operations at sea. The framework includes basic building blocks (e.g., new vehicles, water-tracking Doppler Velocity Logger, physics-based multibeam sonar) as well as development tools (e.g., dynamic bathymetry spawning, ocean currents), which allows the user to focus on methodology rather than software infrastructure. We demonstrate usage through example scenarios, bathymetric data import, user interfaces for data inspection and motion planning for manipulation, and visualizations.