 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven System Level Synthesis
Paper and Code
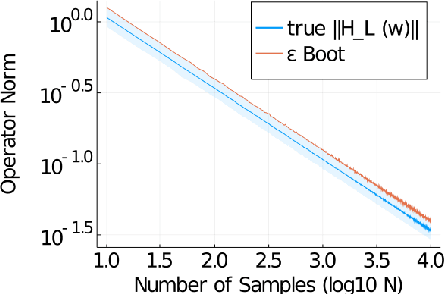
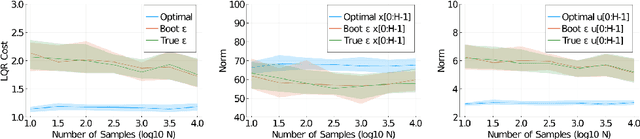
We establish data-driven versions of the System Level Synthesis (SLS) parameterization of stabilizing controllers for linear-time-invariant systems. Inspired by recent work in data-driven control that leverages tools from behavioral theory, we show that optimization problems over system-responses can be posed using only libraries of past system trajectories, without explicitly identifying a system model. We first consider the idealized setting of noise free trajectories, and show an exact equivalence between traditional and data-driven SLS. We then show that in the case of a system driven by process noise, tools from robust SLS can be used to characterize the effects of noise on closed-loop performance, and further draw on tools from matrix concentration to show that a simple trajectory averaging technique can be used to mitigate these effects. We end with numerical experiments showing the soundness of our methods.