 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDark Reciprocal-Rank: Boosting Graph-Convolutional Self-Localization Network via Teacher-to-student Knowledge Transfer
Paper and Code
Nov 01, 2020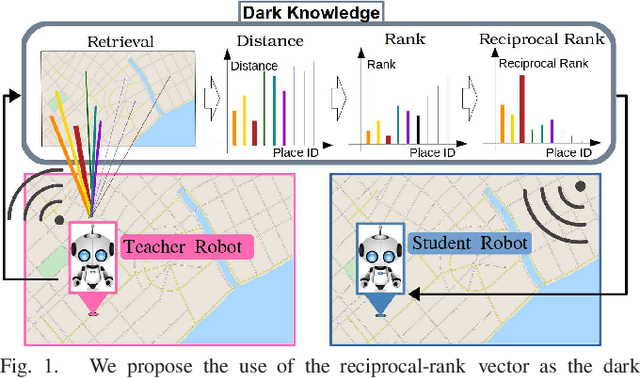
In visual robot self-localization, graph-based scene representation and matching have recently attracted research interest as robust and discriminative methods for selflocalization. Although effective, their computational and storage costs do not scale well to large-size environments. To alleviate this problem, we formulate self-localization as a graph classification problem and attempt to use the graph convolutional neural network (GCN) as a graph classification engine. A straightforward approach is to use visual feature descriptors that are employed by state-of-the-art self-localization systems, directly as graph node features. However, their superior performance in the original self-localization system may not necessarily be replicated in GCN-based self-localization. To address this issue, we introduce a novel teacher-to-student knowledge-transfer scheme based on rank matching, in which the reciprocal-rank vector output by an off-the-shelf state-of-the-art teacher self-localization model is used as the dark knowledge to transfer. Experiments indicate that the proposed graph-convolutional self-localization network can significantly outperform state-of-the-art self-localization systems, as well as the teacher classifier.