 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDARE: AI-based Diver Action Recognition System using Multi-Channel CNNs for AUV Supervision
Paper and Code
Nov 16, 2020
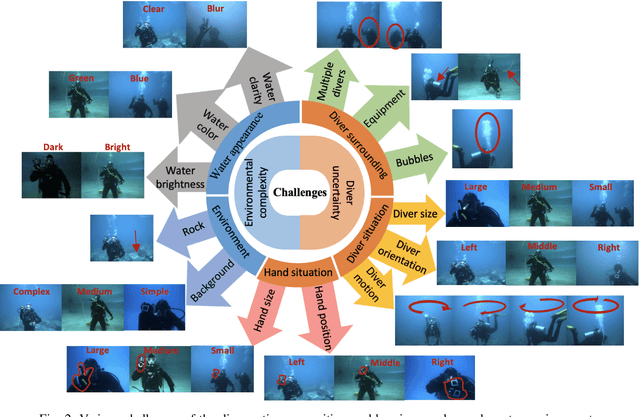
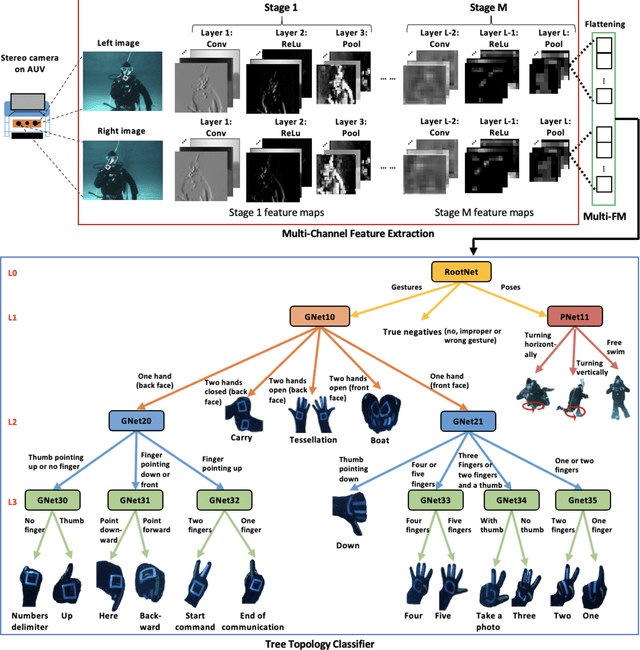
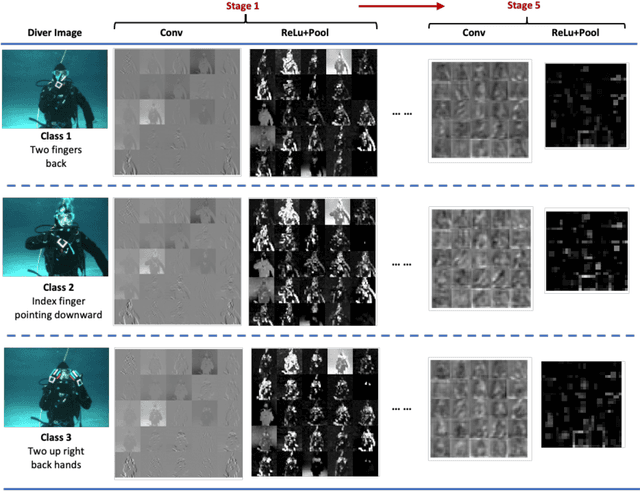
With the growth of sensing, control and robotic technologies, autonomous underwater vehicles (AUVs) have become useful assistants to human divers for performing various underwater operations. In the current practice, the divers are required to carry expensive, bulky, and waterproof keyboards or joystick-based controllers for supervision and control of AUVs. Therefore, diver action-based supervision is becoming increasingly popular because it is convenient, easier to use, faster, and cost effective. However, the various environmental, diver and sensing uncertainties present underwater makes it challenging to train a robust and reliable diver action recognition system. In this regard, this paper presents DARE, a diver action recognition system, that is trained based on Cognitive Autonomous Driving Buddy (CADDY) dataset, which is a rich set of data containing images of different diver gestures and poses in several different and realistic underwater environments. DARE is based on fusion of stereo-pairs of camera images using a multi-channel convolutional neural network supported with a systematically trained tree-topological deep neural network classifier to enhance the classification performance. DARE is fast and requires only a few milliseconds to classify one stereo-pair, thus making it suitable for real-time underwater implementation. DARE is comparatively evaluated against several existing classifier architectures and the results show that DARE supersedes the performance of all classifiers for diver action recognition in terms of overall as well as individual class accuracies and F1-scores.