 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDandelion-Picking Legged Robot
Paper and Code
Dec 10, 2021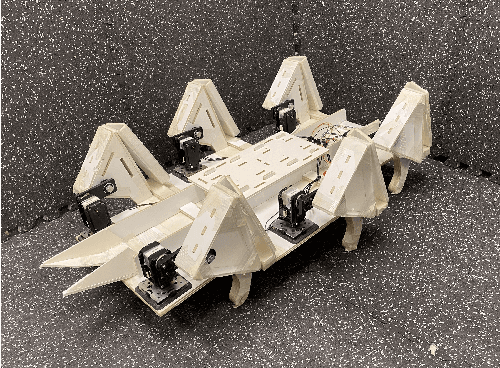
Agriculture is currently undergoing a robotics revolution, but robots using wheeled or treads suffer from known disadvantages: they are unable to move over rubble and steep or loose ground, and they trample continuous strips of land thereby reducing the viable crop area. Legged robots offer an alternative, but existing commercial legged robots are complex, expensive, and hard to maintain. We propose the use of multilegged robots using low-degree-of-freedom (low-DoF) legs and demonstrate our approach with a lawn pest control task: picking dandelions using our inexpensive and easy to fabricate BigANT robot. For this task we added an RGB-D camera to the robot. We also rigidly attached a flower picking appendage to the robot chassis. Thanks to the versatility of legs, the robot could be programmed to perform a ``swooping'' motion that allowed this 0-DoF appendage to pluck the flowers. Our results suggest that robots with six or more low-DoF legs may hit a sweet-spot for legged robots designed for agricultural applications by providing enough mobility, stability, and low complexity.