 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD2A-BSP: Distilled Data Association Belief Space Planning with Performance Guarantees Under Budget Constraints
Paper and Code
Feb 10, 2022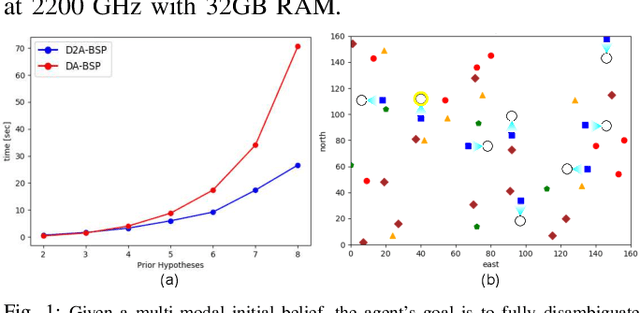
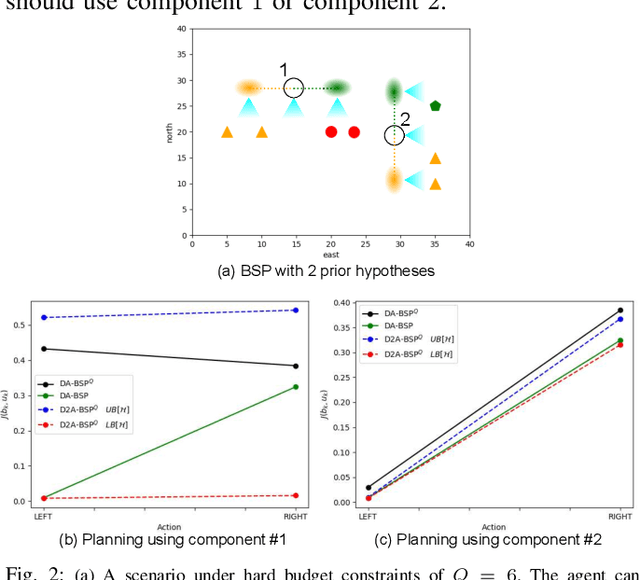
Unresolved data association in ambiguous and perceptually aliased environments leads to multi-modal hypotheses on both the robot's and the environment state. To avoid catastrophic results, when operating in such ambiguous environments, it is crucial to reason about data association within Belief Space Planning (BSP). However, explicitly considering all possible data associations, the number of hypotheses grows exponentially with the planning horizon and determining the optimal action sequence quickly becomes intractable. Moreover, with hard budget constraints where some non-negligible hypotheses must be pruned, achieving performance guarantees is crucial. In this work we present a computationally efficient novel approach that utilizes only a distilled subset of hypotheses to solve BSP problems while reasoning about data association. Furthermore, to provide performance guarantees, we derive error bounds with respect to the optimal solution. We then demonstrate our approach in an extremely aliased environment, where we manage to significantly reduce computation time without compromising on the quality of the solution.