 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurriculum Learning with Hindsight Experience Replay for Sequential Object Manipulation Tasks
Paper and Code
Aug 21, 2020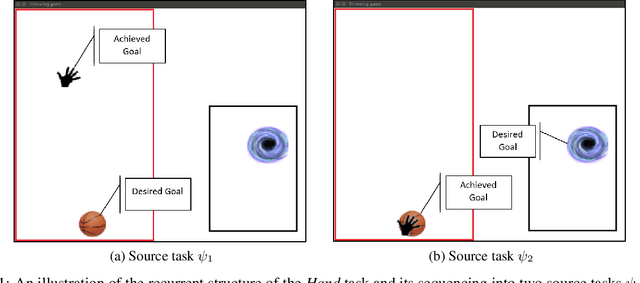
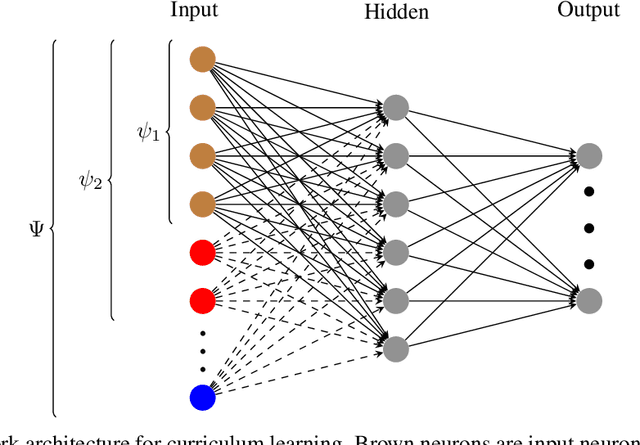
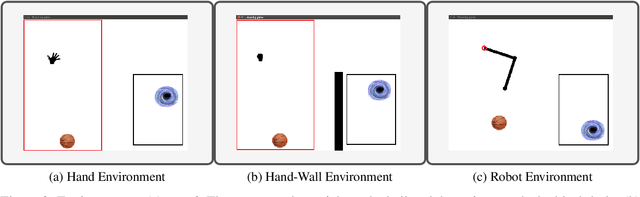
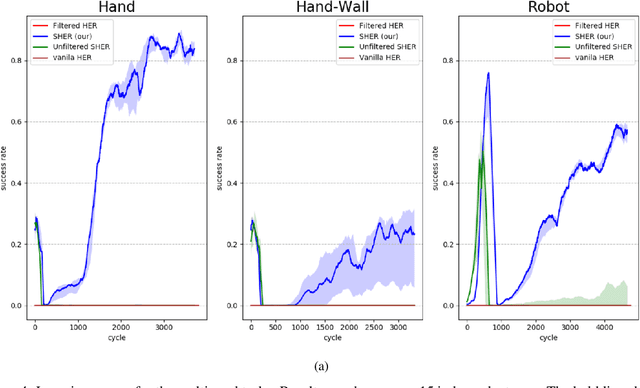
Learning complex tasks from scratch is challenging and often impossible for humans as well as for artificial agents. A curriculum can be used instead, which decomposes a complex task (target task) into a sequence of source tasks (the curriculum). Each source task is a simplified version of the next source task with increasing complexity. Learning then occurs gradually by training on each source task while using knowledge from the curriculum's prior source tasks. In this study, we present a new algorithm that combines curriculum learning with Hindsight Experience Replay (HER), to learn sequential object manipulation tasks for multiple goals and sparse feedback. The algorithm exploits the recurrent structure inherent in many object manipulation tasks and implements the entire learning process in the original simulation without adjusting it to each source task. We have tested our algorithm on three challenging throwing tasks and show vast improvements compared to vanilla-HER.