 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Camera View-Overlap Recognition
Paper and Code
Aug 24, 2022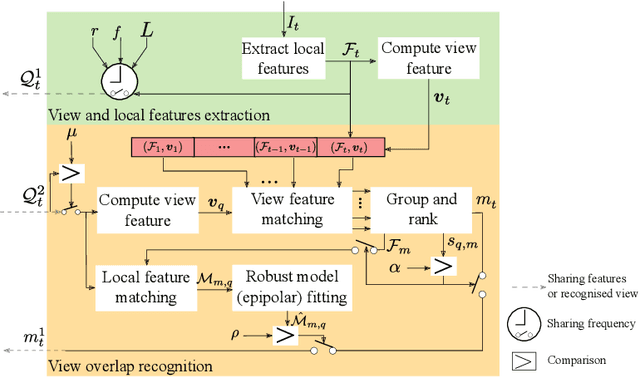
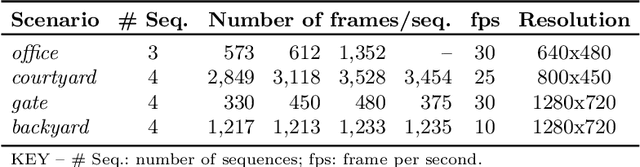
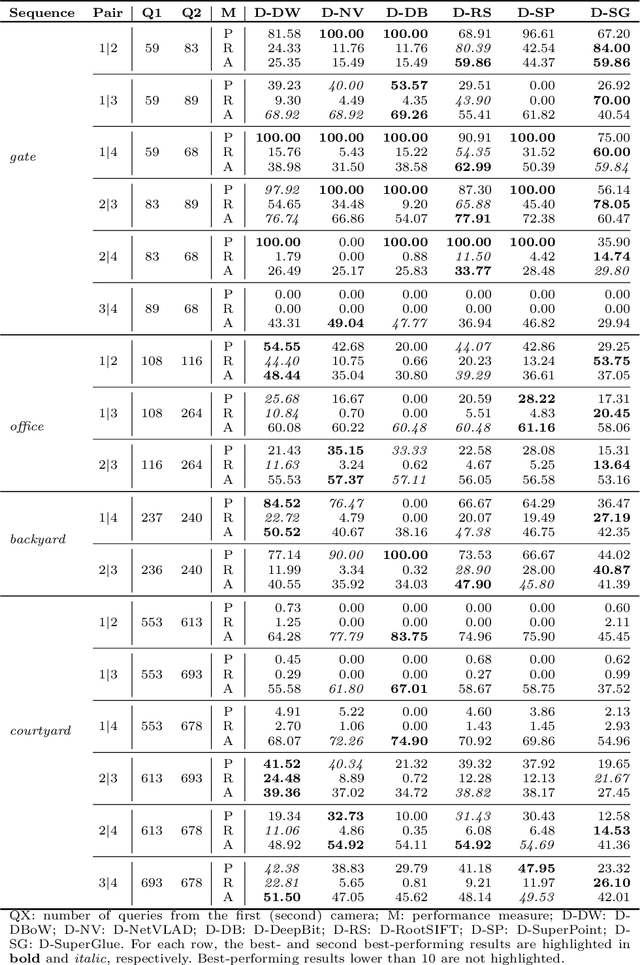
We propose a decentralised view-overlap recognition framework that operates across freely moving cameras without the need of a reference 3D map. Each camera independently extracts, aggregates into a hierarchical structure, and shares feature-point descriptors over time. A view overlap is recognised by view-matching and geometric validation to discard wrongly matched views. The proposed framework is generic and can be used with different descriptors. We conduct the experiments on publicly available sequences as well as new sequences we collected with hand-held cameras. We show that Oriented FAST and Rotated BRIEF (ORB) features with Bags of Binary Words within the proposed framework lead to higher precision and a higher or similar accuracy compared to NetVLAD, RootSIFT, and SuperGlue.