 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCritic PI2: Master Continuous Planning via Policy Improvement with Path Integrals and Deep Actor-Critic Reinforcement Learning
Paper and Code
Nov 13, 2020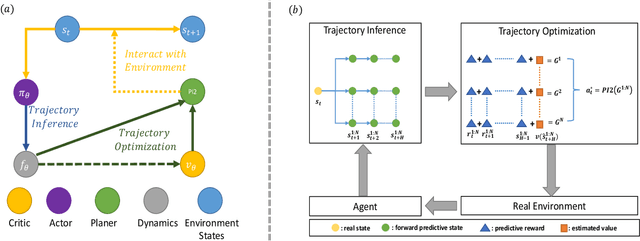
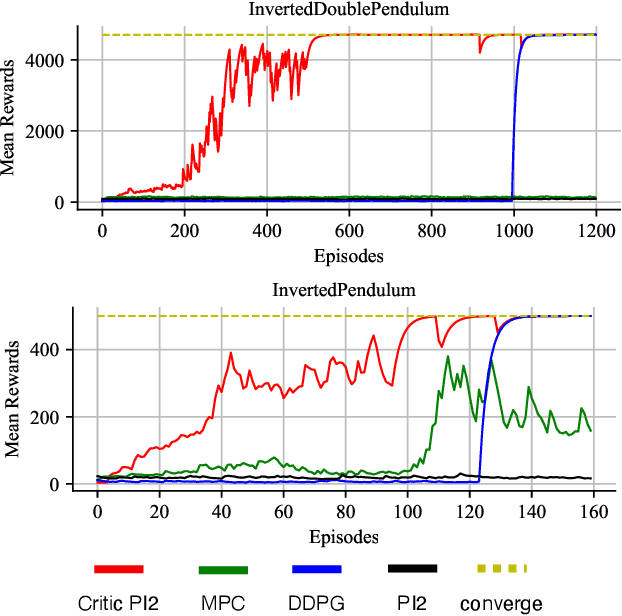
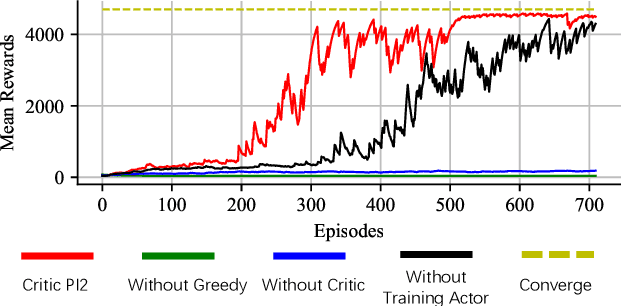
Constructing agents with planning capabilities has long been one of the main challenges in the pursuit of artificial intelligence. Tree-based planning methods from AlphaGo to Muzero have enjoyed huge success in discrete domains, such as chess and Go. Unfortunately, in real-world applications like robot control and inverted pendulum, whose action space is normally continuous, those tree-based planning techniques will be struggling. To address those limitations, in this paper, we present a novel model-based reinforcement learning frameworks called Critic PI2, which combines the benefits from trajectory optimization, deep actor-critic learning, and model-based reinforcement learning. Our method is evaluated for inverted pendulum models with applicability to many continuous control systems. Extensive experiments demonstrate that Critic PI2 achieved a new state of the art in a range of challenging continuous domains. Furthermore, we show that planning with a critic significantly increases the sample efficiency and real-time performance. Our work opens a new direction toward learning the components of a model-based planning system and how to use them.