 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperation for Scalable Supervision of Autonomy in Mixed Traffic
Paper and Code
Dec 14, 2021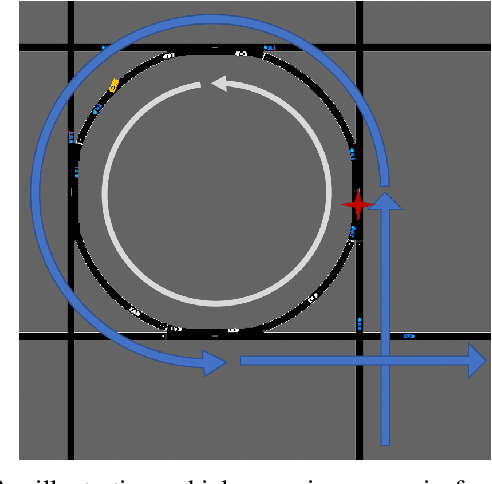
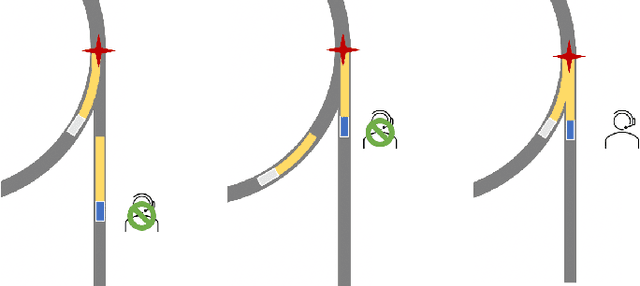
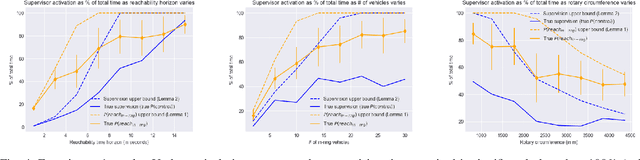
Improvements in autonomy offer the potential for positive outcomes in a number of domains, yet guaranteeing their safe deployment is difficult. This work investigates how humans can intelligently supervise agents to achieve some level of safety even when performance guarantees are elusive. The motivating research question is: In safety-critical settings, can we avoid the need to have one human supervise one machine at all times? The paper formalizes this 'scaling supervision' problem, and investigates its application to the safety-critical context of autonomous vehicles (AVs) merging into traffic. It proposes a conservative, reachability-based method to reduce the burden on the AVs' human supervisors, which allows for the establishment of high-confidence upper bounds on the supervision requirements in this setting. Order statistics and traffic simulations with deep reinforcement learning show analytically and numerically that teaming of AVs enables supervision time sublinear in AV adoption. A key takeaway is that, despite present imperfections of AVs, supervision becomes more tractable as AVs are deployed en masse. While this work focuses on AVs, the scalable supervision framework is relevant to a broader array of autonomous control challenges.