 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Joint Graph Matching and Clustering via Semidefinite Relaxations
Paper and Code
Oct 21, 2021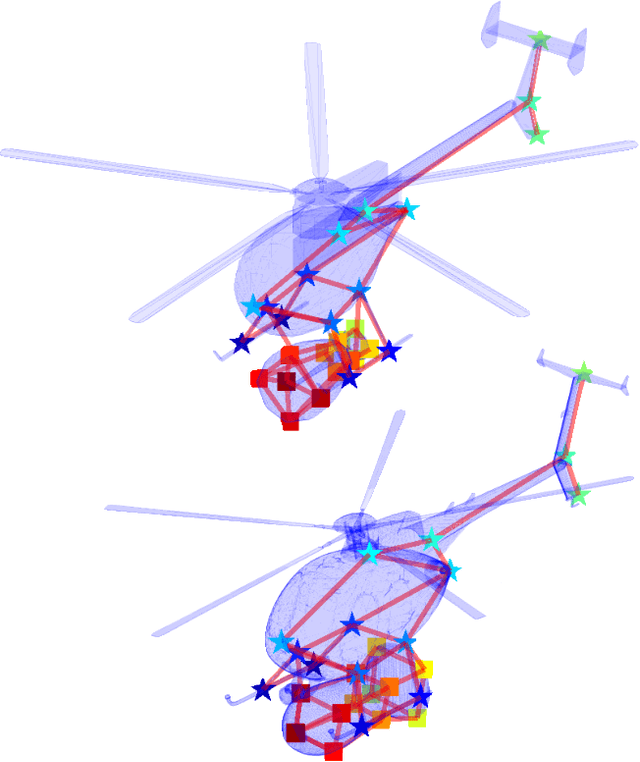
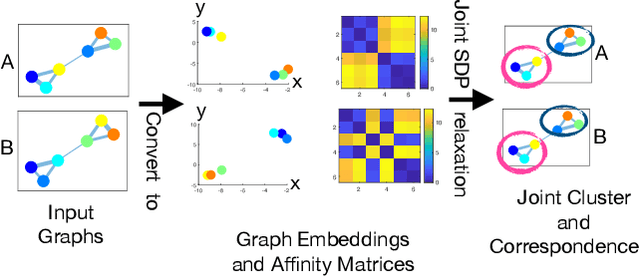
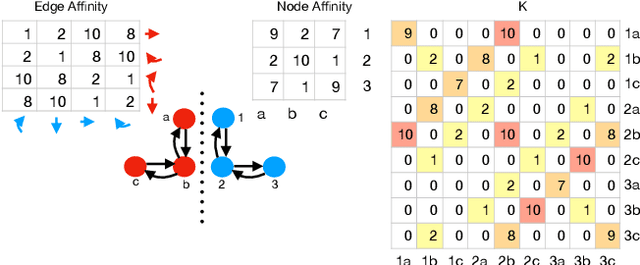

This paper proposes a new algorithm for simultaneous graph matching and clustering. For the first time in the literature, these two problems are solved jointly and synergetically without relying on any training data, which brings advantages for identifying similar arbitrary objects in compound 3D scenes and matching them. For joint reasoning, we first rephrase graph matching as a rigid point set registration problem operating on spectral graph embeddings. Consequently, we utilise efficient convex semidefinite program relaxations for aligning points in Hilbert spaces and add coupling constraints to model the mutual dependency and exploit synergies between both tasks. We outperform state of the art in challenging cases with non-perfectly matching and noisy graphs, and we show successful applications on real compound scenes with multiple 3D elements. Our source code and data are publicly available.