 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvergence Rates for Stochastic Approximation: Biased Noise with Unbounded Variance, and Applications
Paper and Code
Dec 05, 2023
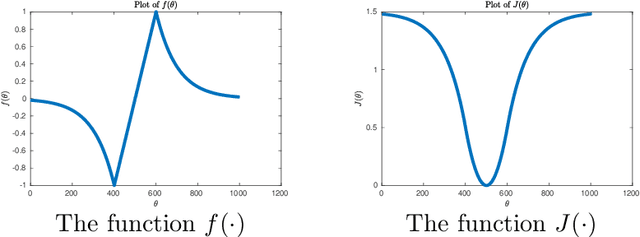
The Stochastic Approximation (SA) algorithm introduced by Robbins and Monro in 1951 has been a standard method for solving equations of the form $\mathbf{f}({\boldsymbol {\theta}}) = \mathbf{0}$, when only noisy measurements of $\mathbf{f}(\cdot)$ are available. If $\mathbf{f}({\boldsymbol {\theta}}) = \nabla J({\boldsymbol {\theta}})$ for some function $J(\cdot)$, then SA can also be used to find a stationary point of $J(\cdot)$. In much of the literature, it is assumed that the error term ${\boldsymbol {xi}}_{t+1}$ has zero conditional mean, and that its conditional variance is bounded as a function of $t$ (though not necessarily with respect to ${\boldsymbol {\theta}}_t$). Also, for the most part, the emphasis has been on ``synchronous'' SA, whereby, at each time $t$, \textit{every} component of ${\boldsymbol {\theta}}_t$ is updated. Over the years, SA has been applied to a variety of areas, out of which two are the focus in this paper: Convex and nonconvex optimization, and Reinforcement Learning (RL). As it turns out, in these applications, the above-mentioned assumptions do not always hold. In zero-order methods, the error neither has zero mean nor bounded conditional variance. In the present paper, we extend SA theory to encompass errors with nonzero conditional mean and/or unbounded conditional variance, and also asynchronous SA. In addition, we derive estimates for the rate of convergence of the algorithm. Then we apply the new results to problems in nonconvex optimization, and to Markovian SA, a recently emerging area in RL. We prove that SA converges in these situations, and compute the ``optimal step size sequences'' to maximize the estimated rate of convergence.