 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlling the Cascade: Kinematic Planning for N-ball Toss Juggling
Paper and Code
Jul 04, 2022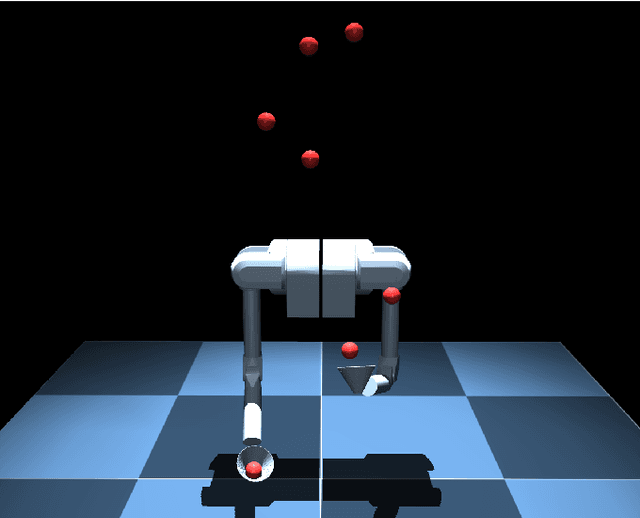

Dynamic movements are ubiquitous in human motor behavior as they tend to be more efficient and can solve a broader range of skill domains than their quasi-static counterparts. For decades, robotic juggling tasks have been among the most frequently studied dynamic manipulation problems since the required dynamic dexterity can be scaled to arbitrarily high difficulty. However, successful approaches have been limited to basic juggling skills, indicating a lack of understanding of the required constraints for dexterous toss juggling. We present a detailed analysis of the toss juggling task, identifying the key challenges and formalizing it as a trajectory optimization problem. Building on our state-of-the-art, real-world toss juggling platform, we reach the theoretical limits of toss juggling in simulation, evaluate a resulting real-time controller in environments of varying difficulty and achieve robust toss juggling of up to 17 balls on two anthropomorphic manipulators.