Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl What You Can: Intrinsically Motivated Task-Planning Agent
Paper and Code
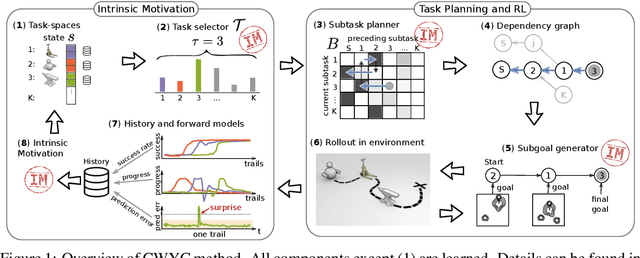
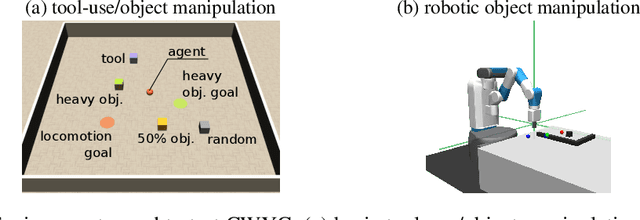
We present a novel intrinsically motivated agent that learns how to control the environment in the fastest possible manner by optimizing learning progress. It learns what can be controlled, how to allocate time and attention, and the relations between objects using surprise based motivation. The effectiveness of our method is demonstrated in a synthetic as well as a robotic manipulation environment yielding considerably improved performance and smaller sample complexity. In a nutshell, our work combines several task-level planning agent structures (backtracking search on task graph, probabilistic road-maps, allocation of search efforts) with intrinsic motivation to achieve learning from scratch.
View paper on