 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Design of Autonomous Drone Using Deep Learning Based Image Understanding Techniques
Paper and Code
Apr 28, 2020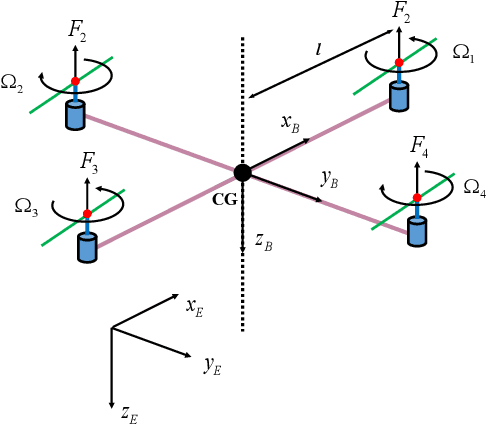
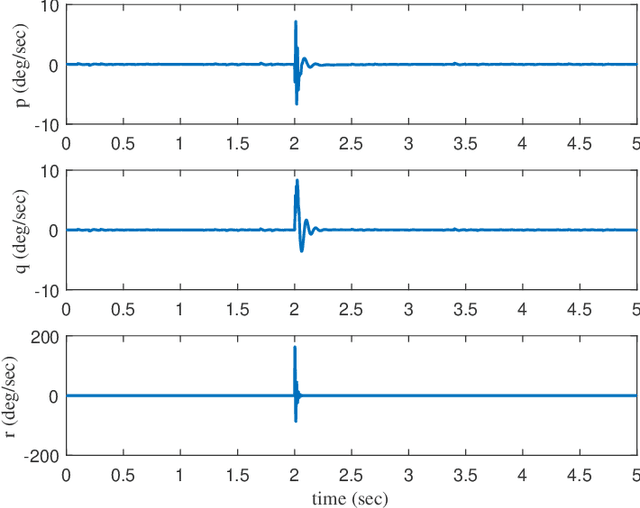
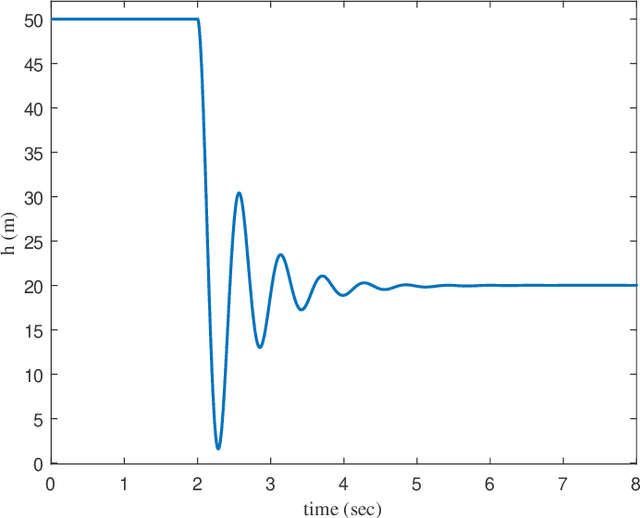
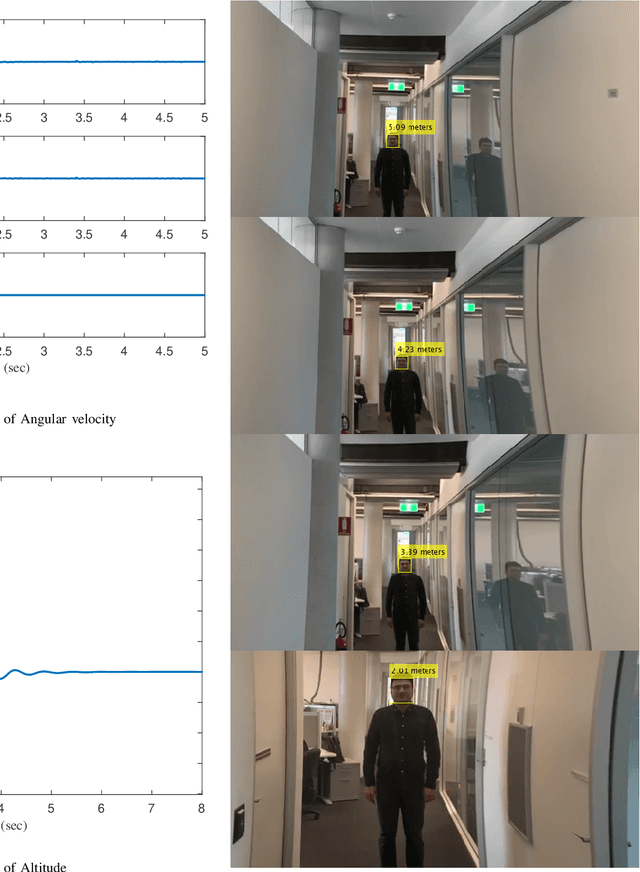
This paper presents a new framework to use images as the inputs for the controller to have autonomous flight, considering the noisy indoor environment and uncertainties. A new Proportional-Integral-Derivative-Accelerated (PIDA) control with a derivative filter is proposed to improves drone/quadcopter flight stability within a noisy environment and enables autonomous flight using object and depth detection techniques. The mathematical model is derived from an accurate model with a high level of fidelity by addressing the problems of non-linearity, uncertainties, and coupling. The proposed PIDA controller is tuned by Stochastic Dual Simplex Algorithm (SDSA) to support autonomous flight. The simulation results show that adapting the deep learning-based image understanding techniques (RetinaNet ant colony detection and PSMNet) to the proposed controller can enable the generation and tracking of the desired point in the presence of environmental disturbances.