 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous MDP Homomorphisms and Homomorphic Policy Gradient
Paper and Code
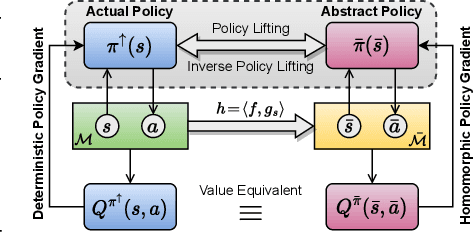
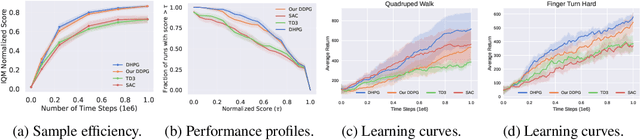
Abstraction has been widely studied as a way to improve the efficiency and generalization of reinforcement learning algorithms. In this paper, we study abstraction in the continuous-control setting. We extend the definition of MDP homomorphisms to encompass continuous actions in continuous state spaces. We derive a policy gradient theorem on the abstract MDP, which allows us to leverage approximate symmetries of the environment for policy optimization. Based on this theorem, we propose an actor-critic algorithm that is able to learn the policy and the MDP homomorphism map simultaneously, using the lax bisimulation metric. We demonstrate the effectiveness of our method on benchmark tasks in the DeepMind Control Suite. Our method's ability to utilize MDP homomorphisms for representation learning leads to improved performance when learning from pixel observations.