 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-discrete multiple target tracking with out-of-sequence measurements
Paper and Code

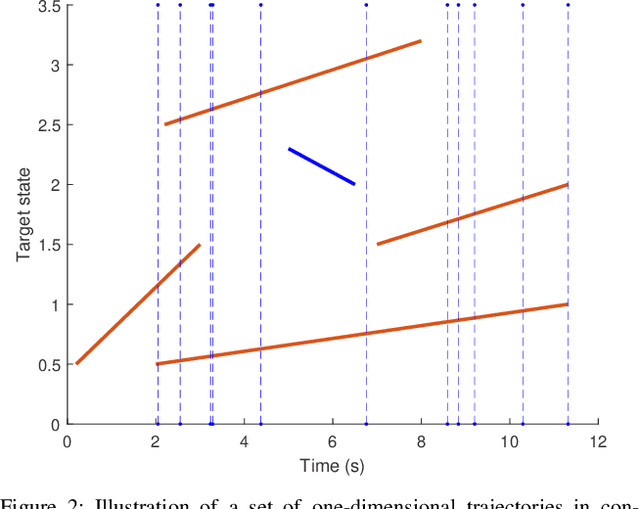
This paper derives the optimal Bayesian processing of an out-of-sequence (OOS) set of measurements in continuous-time for multiple target tracking. We consider a multi-target system modelled in continuous time that is discretised at the time steps when we receive the measurements, which are distributed according to the standard point target model. All information about this system at the sampled time steps is provided by the posterior density on the set of all trajectories. This density can be computed via the continuous-discrete trajectory Poisson multi-Bernoulli mixture (TPMBM) filter. When we receive an OOS measurement, the optimal Bayesian processing performs a retrodiction step that adds trajectory information at the OOS measurement time stamp followed by an update step. After the OOS measurement update, the posterior remains in TPMBM form. We also provide a computationally lighter alternative based on a trajectory Poisson multi-Bernoulli filter. The effectiveness of the two approaches to handle OOS measurements is evaluated via simulations.