 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Robot Learning using Self-Supervised Task Inference
Paper and Code
Sep 10, 2023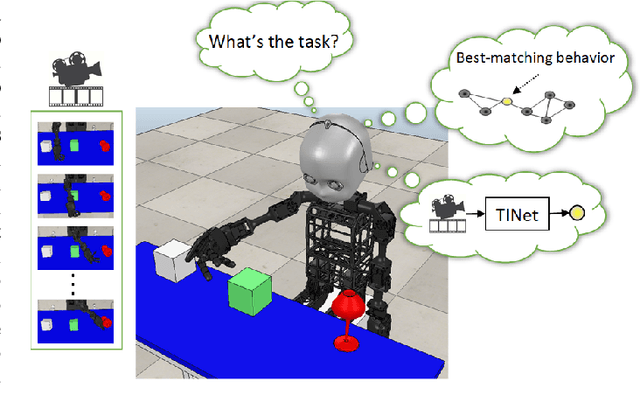
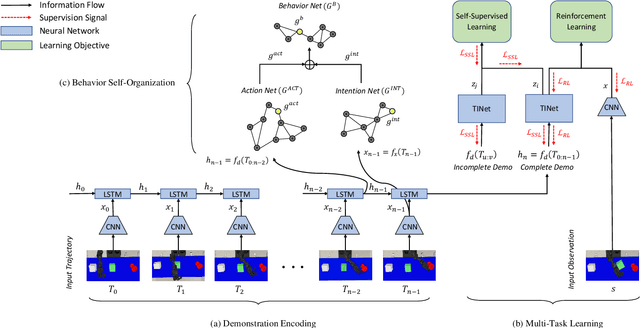
Endowing robots with the human ability to learn a growing set of skills over the course of a lifetime as opposed to mastering single tasks is an open problem in robot learning. While multi-task learning approaches have been proposed to address this problem, they pay little attention to task inference. In order to continually learn new tasks, the robot first needs to infer the task at hand without requiring predefined task representations. In this paper, we propose a self-supervised task inference approach. Our approach learns action and intention embeddings from self-organization of the observed movement and effect parts of unlabeled demonstrations and a higher-level behavior embedding from self-organization of the joint action-intention embeddings. We construct a behavior-matching self-supervised learning objective to train a novel Task Inference Network (TINet) to map an unlabeled demonstration to its nearest behavior embedding, which we use as the task representation. A multi-task policy is built on top of the TINet and trained with reinforcement learning to optimize performance over tasks. We evaluate our approach in the fixed-set and continual multi-task learning settings with a humanoid robot and compare it to different multi-task learning baselines. The results show that our approach outperforms the other baselines, with the difference being more pronounced in the challenging continual learning setting, and can infer tasks from incomplete demonstrations. Our approach is also shown to generalize to unseen tasks based on a single demonstration in one-shot task generalization experiments.