 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Occlusions and Optical Flow Estimation
Paper and Code
Nov 05, 2018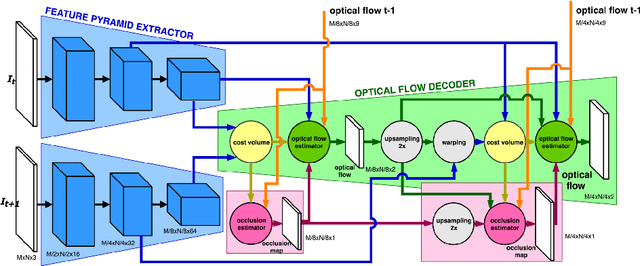
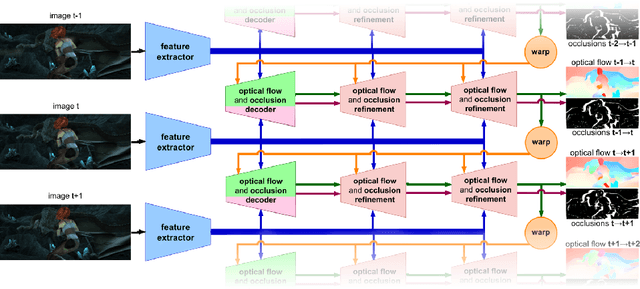

Two optical flow estimation problems are addressed: i) occlusion estimation and handling, and ii) estimation from image sequences longer than two frames. The proposed ContinualFlow method estimates occlusions before flow, avoiding the use of flow corrupted by occlusions for their estimation. We show that providing occlusion masks as an additional input to flow estimation improves the standard performance metric by more than 25\% on both KITTI and Sintel. As a second contribution, a novel method for incorporating information from past frames into flow estimation is introduced. The previous frame flow serves as an input to occlusion estimation and as a prior in occluded regions, i.e. those without visual correspondences. By continually using the previous frame flow, ContinualFlow performance improves further by 18\% on KITTI and 7\% on Sintel, achieving top performance on KITTI and Sintel.