 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext Prediction for Unsupervised Deep Learning on Point Clouds
Paper and Code
Jan 24, 2019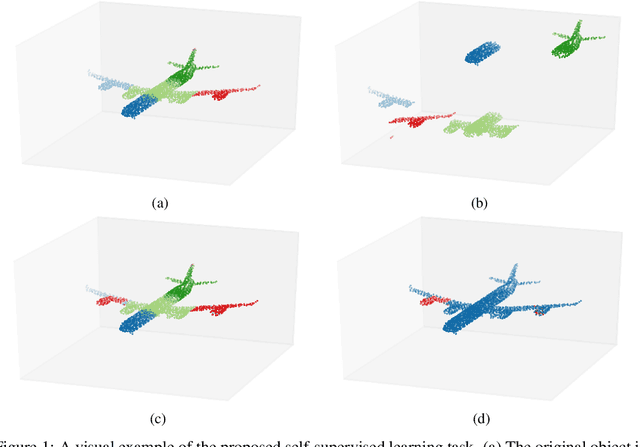

Point clouds provide a flexible and natural representation usable in countless applications such as robotics or self-driving cars. Recently, deep neural networks operating on raw point cloud data have shown promising results on supervised learning tasks such as object classification and semantic segmentation. While massive point cloud datasets can be captured using modern scanning technology, manually labelling such large 3D point clouds for supervised learning tasks is a cumbersome process. This necessitates effective unsupervised learning methods that can produce representations such that downstream tasks require significantly fewer annotated samples. We propose a novel method for unsupervised learning on raw point cloud data in which a neural network is trained to predict the spatial relationship between two point cloud segments. While solving this task, representations that capture semantic properties of the point cloud are learned. Our method outperforms previous unsupervised learning approaches in downstream object classification and segmentation tasks and performs on par with fully supervised methods.