 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContent Disentanglement for Semantically Consistent Synthetic-to-Real Domain Adaptation
Paper and Code
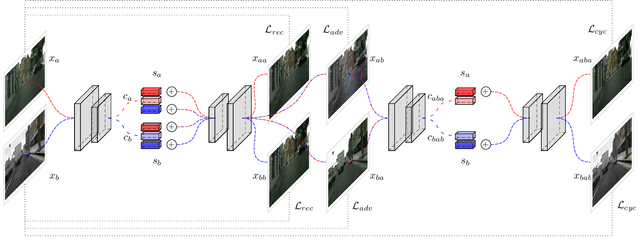



Synthetic data generation is an appealing approach to generate novel traffic scenarios in autonomous driving. However, deep learning techniques trained solely on synthetic data encounter dramatic performance drops when they are tested on real data. Such performance drop is commonly attributed to the domain gap between real and synthetic data. Domain adaptation methods have been applied to mitigate the aforementioned domain gap. These methods achieve visually appealing results, but the translated samples usually introduce semantic inconsistencies. In this work, we propose a new, unsupervised, end-to-end domain adaptation network architecture that enables semantically consistent domain adaptation between synthetic and real data. We evaluate our architecture on the downstream task of semantic segmentation and show that our method achieves superior performance compared to the state-of-the-art methods.