 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContent-Aware Unsupervised Deep Homography Estimation
Paper and Code
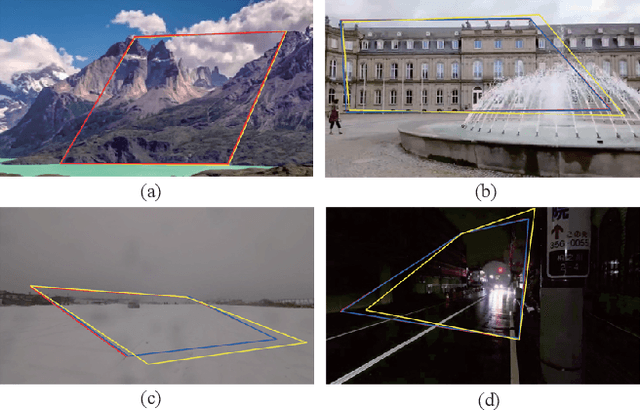

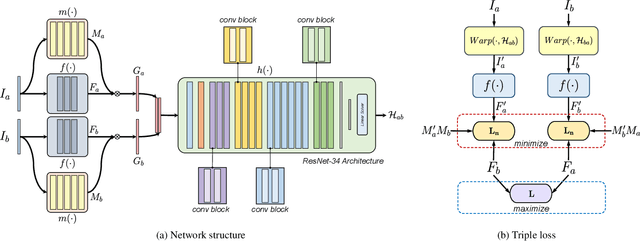
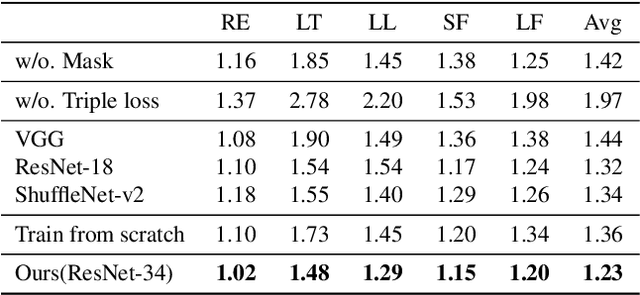
Robust homography estimation between two images is a fundamental task which has been widely applied to various vision applications. Traditional feature based methods often detect image features and fit a homography according to matched features with RANSAC outlier removal. However, the quality of homography heavily relies on the quality of image features, which are prone to errors with respect to low light and low texture images. On the other hand, previous deep homography approaches either synthesize images for supervised learning or adopt aerial images for unsupervised learning, both ignoring the importance of depth disparities in homography estimation. Moreover, they treat the image content equally, including regions of dynamic objects and near-range foregrounds, which further decreases the quality of estimation. In this work, to overcome such problems, we propose an unsupervised deep homography method with a new architecture design. We learn a mask during the estimation to reject outlier regions. In addition, we calculate loss with respect to our learned deep features instead of directly comparing the image contents as did previously. Moreover, a comprehensive dataset is presented, covering both regular and challenging cases, such as poor textures and non-planar interferences. The effectiveness of our method is validated through comparisons with both feature-based and previous deep-based methods. Code will be soon available at Github.