Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact Surface Estimation via Haptic Perception
Paper and Code
Mar 04, 2020
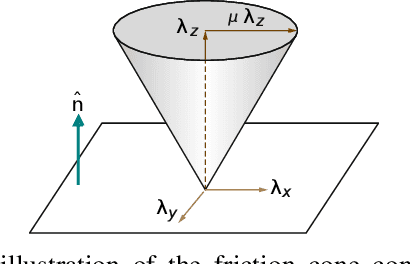
Legged systems need to optimize contact force in order to maintain contacts. For this, the controller needs to have the knowledge of the surface geometry and how slippery the terrain is. We can use a vision system to realize the terrain, but the accuracy of the vision system degrades in harsh weather, and it cannot visualize the terrain if it is covered with water or grass. Also, the degree of friction cannot be directly visualized. In this paper, we propose an online method to estimate the surface information via haptic exploration. We also introduce a probabilistic criterion to measure the quality of the estimation. The method is validated on both simulation and a real robot platform.
* Accepted for publications in IEEE International Conference on
Robotics and Automation, 2020
View paper on