 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Implicit Trajectory Optimization Based on a Variable Smooth Contact Model and Successive Convexification
Paper and Code
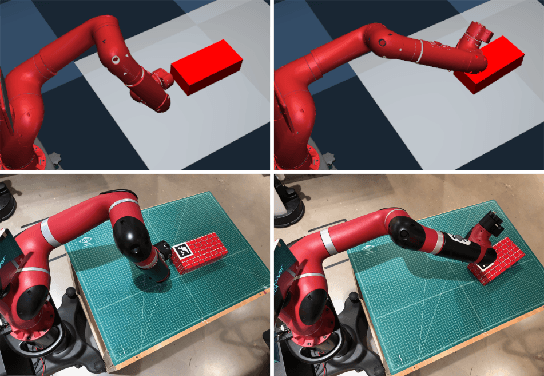
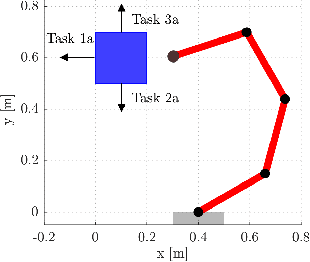

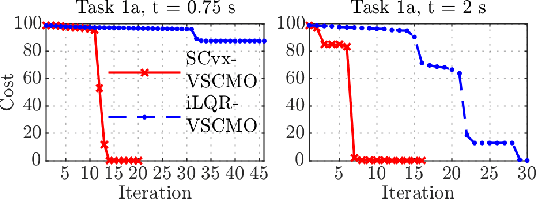
In this paper, we propose a contact-implicit trajectory optimization (CITO) method based on a variable smooth contact model (VSCM) and successive convexification (SCvx). The VSCM facilitates the convergence of gradient-based optimization without compromising physical fidelity. On the other hand, the proposed SCvx-based approach combines the advantages of direct and shooting methods for CITO. For evaluations, we consider non-prehensile manipulation tasks. The proposed method is compared to a version based on iterative linear quadratic regulator (iLQR) on a planar example. The results demonstrate that both methods can find physically-consistent motions that complete the tasks without a meaningful initial guess owing to the VSCM. The proposed SCvx-based method outperforms the iLQR-based method in terms of convergence, computation time, and the quality of motions found. Finally, the proposed SCvx-based method is tested on a standard robot platform and shown to perform efficiently for a real-world application.