Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstraining the Size Growth of the Task Space with Socially Guided Intrinsic Motivation using Demonstrations
Paper and Code
Nov 29, 2011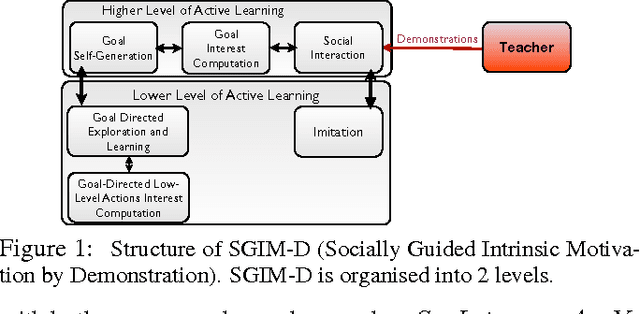
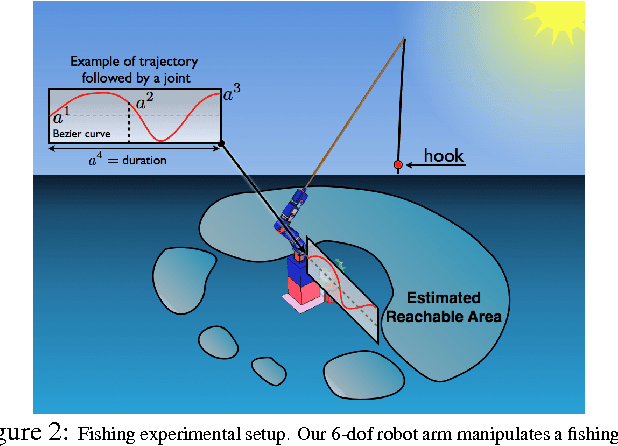
This paper presents an algorithm for learning a highly redundant inverse model in continuous and non-preset environments. Our Socially Guided Intrinsic Motivation by Demonstrations (SGIM-D) algorithm combines the advantages of both social learning and intrinsic motivation, to specialise in a wide range of skills, while lessening its dependence on the teacher. SGIM-D is evaluated on a fishing skill learning experiment.
* JCAI Workshop on Agents Learning Interactively from Human Teachers
(ALIHT), Barcelona : Spain (2011)
View paper on