 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Motion Planning for a Robotic Endoscope Holder based on Hierarchical Quadratic Programming
Paper and Code
Jun 14, 2024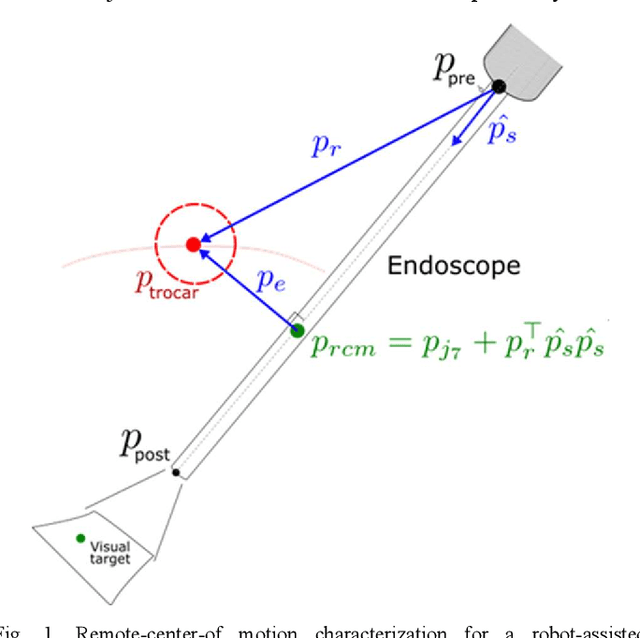
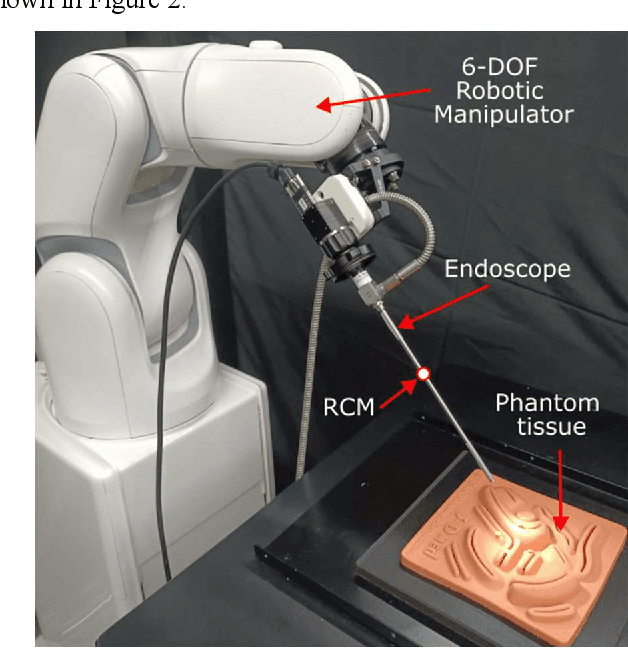
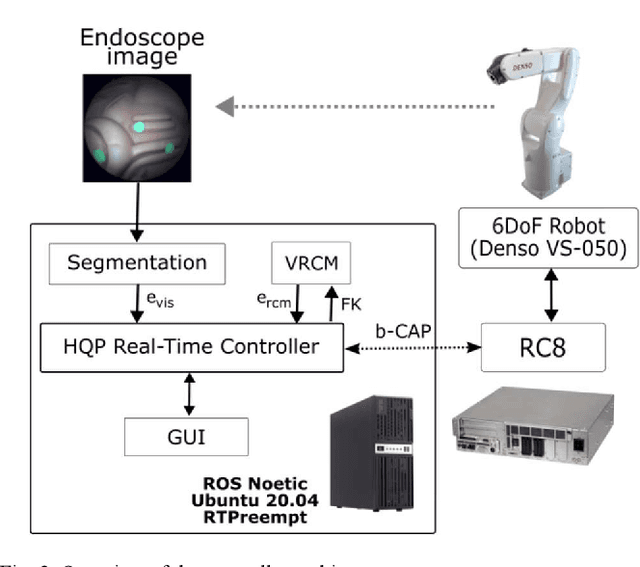
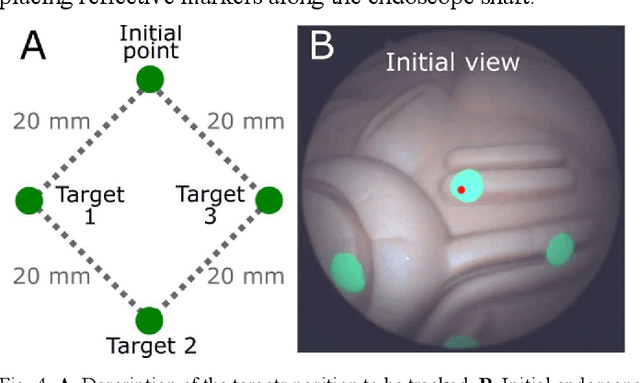
Minimally Invasive Surgeries (MIS) are challenging for surgeons due to the limited field of view and constrained range of motion imposed by narrow access ports. These challenges can be addressed by robot-assisted endoscope systems which provide precise and stabilized positioning, as well as constrained and smooth motion control of the endoscope. In this work, we propose an online hierarchical optimization framework for visual servoing control of the endoscope in MIS. The framework prioritizes maintaining a remote-center-of-motion (RCM) constraint to prevent tissue damage, while a visual tracking task is defined as a secondary task to enable autonomous tracking of visual features of interest. We validated our approach using a 6-DOF Denso VS050 manipulator and achieved optimization solving times under 0.4 ms and maximum RCM deviation of approximately 0.4 mm. Our results demonstrate the effectiveness of the proposed approach in addressing the constrained motion planning challenges of MIS, enabling precise and autonomous endoscope positioning and visual tracking.