 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Equation Learner Networks for Precision-Preserving Extrapolation of Robotic Skills
Paper and Code
Nov 04, 2023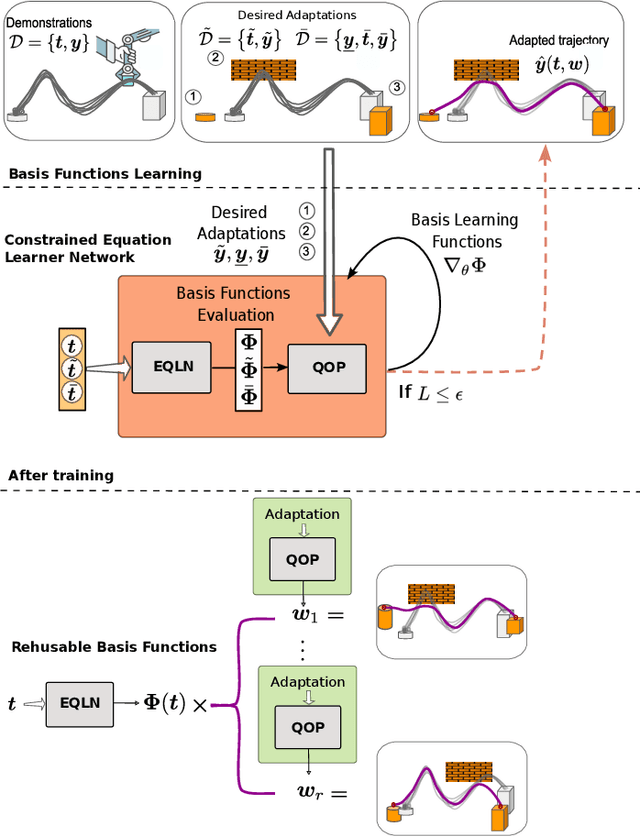



In Programming by Demonstration, the robot learns novel skills from human demonstrations. After learning, the robot should be able not only to reproduce the skill, but also to generalize it to shifted domains without collecting new training data. Adaptation to similar domains has been investigated in the literature; however, an open problem is how to adapt learned skills to different conditions that are outside of the data distribution, and, more important, how to preserve the precision of the desired adaptations. This paper presents a novel supervised learning framework called Constrained Equation Learner Networks that addresses the trajectory adaptation problem in Programming by Demonstrations from a constrained regression perspective. While conventional approaches for constrained regression use one kind of basis function, e.g., Gaussian, we exploit Equation Learner Networks to learn a set of analytical expressions and use them as basis functions. These basis functions are learned from demonstration with the objective to minimize deviations from the training data while imposing constraints that represent the desired adaptations, like new initial or final points or maintaining the trajectory within given bounds. Our approach addresses three main difficulties in adapting robotic trajectories: 1) minimizing the distortion of the trajectory for new adaptations; 2) preserving the precision of the adaptations; and 3) dealing with the lack of intuition about the structure of basis functions. We validate our approach both in simulation and in real experiments in a set of robotic tasks that require adaptation due to changes in the environment, and we compare obtained results with two existing approaches. Performed experiments show that Constrained Equation Learner Networks outperform state of the art approaches by increasing generalization and adaptability of robotic skills.