Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus on the average in arbitrary directed network topologies with time-delays
Paper and Code
Feb 15, 2015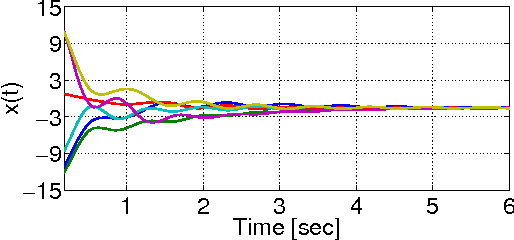

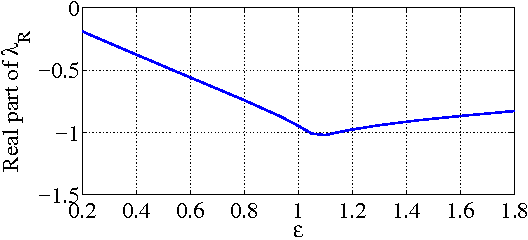
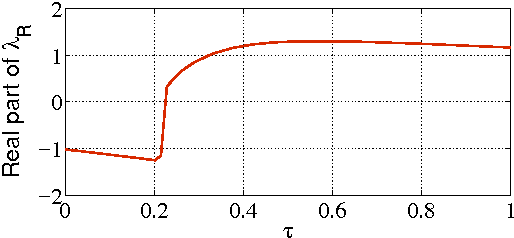
In this preliminary paper we study the stability property of a consensus on the average algorithm in arbitrary directed graphs with respect to communication/sensing time-delays. The proposed algorithm adds a storage variable to the agents' states so that the information about the average of the states is preserved despite the algorithm iterations are performed in an arbitrary strongly connected directed graph. We prove that for any network topology and choice of design parameters the consensus on the average algorithm is stable for sufficiently small delays. We provide simulations and numerical results to estimate the maximum delay allowed by an arbitrary unbalanced directed network topology.
* 4th IFAC Workshop on Distributed Estimation and Control in Networked
Systems (NecSys)
View paper on