 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Imitation Learning for Multi-Agent Games
Paper and Code
Jan 05, 2022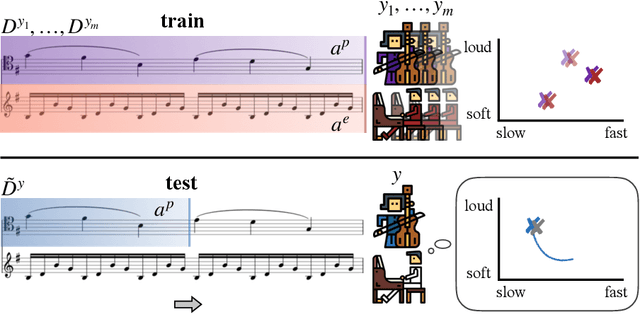
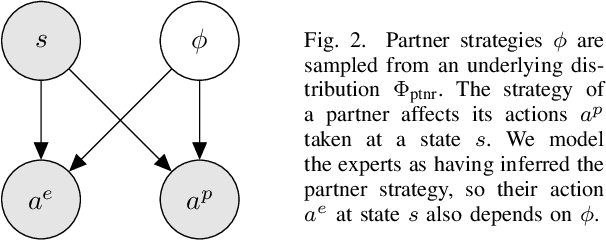
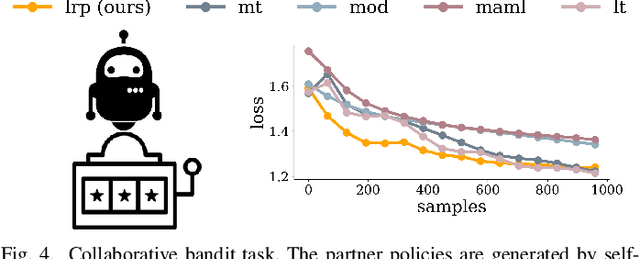
While advances in multi-agent learning have enabled the training of increasingly complex agents, most existing techniques produce a final policy that is not designed to adapt to a new partner's strategy. However, we would like our AI agents to adjust their strategy based on the strategies of those around them. In this work, we study the problem of conditional multi-agent imitation learning, where we have access to joint trajectory demonstrations at training time, and we must interact with and adapt to new partners at test time. This setting is challenging because we must infer a new partner's strategy and adapt our policy to that strategy, all without knowledge of the environment reward or dynamics. We formalize this problem of conditional multi-agent imitation learning, and propose a novel approach to address the difficulties of scalability and data scarcity. Our key insight is that variations across partners in multi-agent games are often highly structured, and can be represented via a low-rank subspace. Leveraging tools from tensor decomposition, our model learns a low-rank subspace over ego and partner agent strategies, then infers and adapts to a new partner strategy by interpolating in the subspace. We experiments with a mix of collaborative tasks, including bandits, particle, and Hanabi environments. Additionally, we test our conditional policies against real human partners in a user study on the Overcooked game. Our model adapts better to new partners compared to baselines, and robustly handles diverse settings ranging from discrete/continuous actions and static/online evaluation with AI/human partners.