 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConcept Learning in Deep Reinforcement Learning
Paper and Code
May 19, 2020
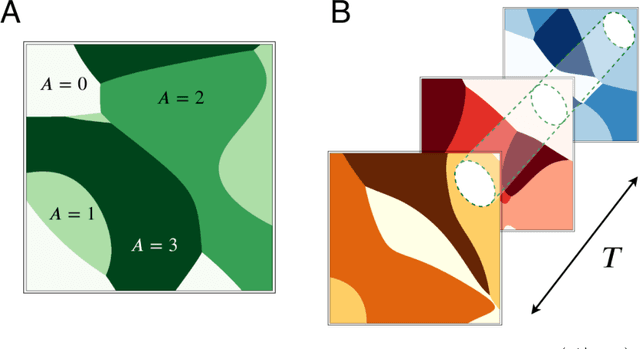


Deep reinforcement learning techniques have shown to be a promising path to solve very complex tasks that once were thought to be out of the realm of machines. However, while humans and animals learn incrementally during their lifetimes and exploit their experience to solve new tasks, standard deep learning methods specialize to solve only one task at a time and whatever information they acquire is hardly reusable in new situations. Given that any artificial agent would need such a generalization ability to deal with the complexities of the world, it is critical to understand what mechanisms give rise to this ability. We argue that one of the mechanisms humans rely on is the use of discrete conceptual representations to encode their sensory inputs. These representations group similar inputs in such a way that combined they provide a level of abstraction that is transverse to a wide variety of tasks, filtering out irrelevant information for their solution. Here, we show that it is possible to learn such concept-like representations by self-supervision, following an information-bottleneck approach, and that these representations accelerate the transference of skills by providing a prior that guides the policy optimization process. Our method is able to learn useful concepts in locomotive tasks that significantly reduce the number of optimization steps required, opening a new path to endow artificial agents with generalization abilities.