 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposite Layers for Deep Anomaly Detection on 3D Point Clouds
Paper and Code
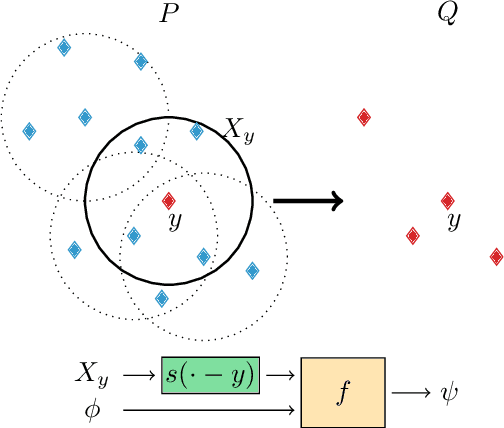
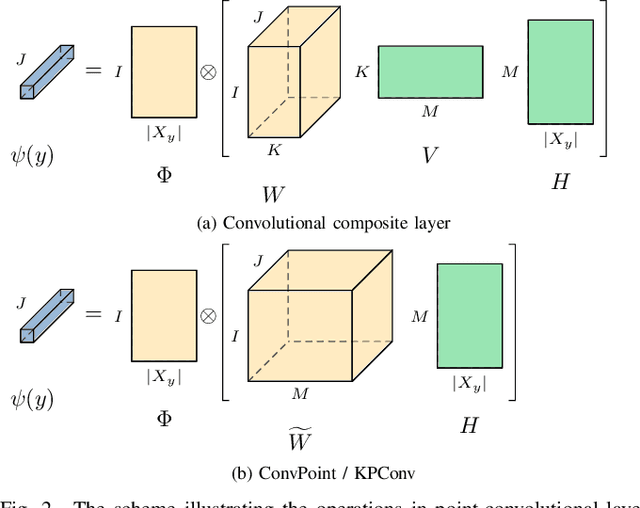
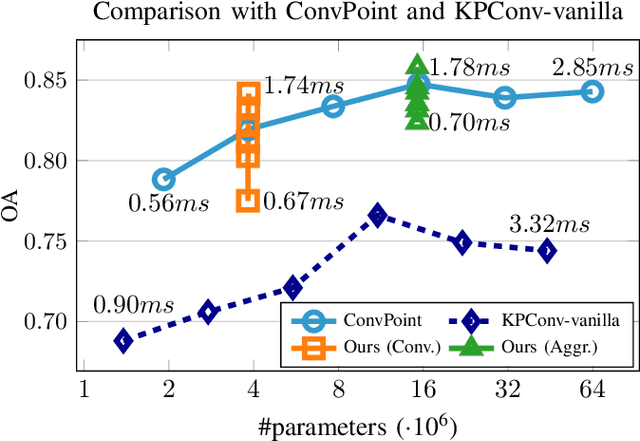
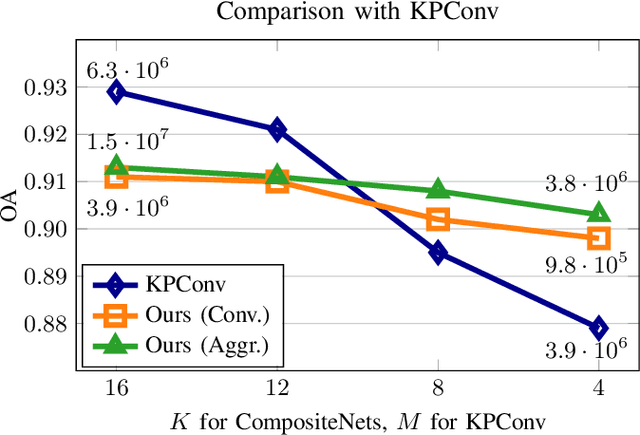
Deep neural networks require specific layers to process point clouds, as the scattered and irregular location of points prevents us from using convolutional filters. Here we introduce the composite layer, a new convolutional operator for point clouds. The peculiarity of our composite layer is that it extracts and compresses the spatial information from the position of points before combining it with their feature vectors. Compared to well-known point-convolutional layers such as those of ConvPoint and KPConv, our composite layer provides additional regularization and guarantees greater flexibility in terms of design and number of parameters. To demonstrate the design flexibility, we also define an aggregate composite layer that combines spatial information and features in a nonlinear manner, and we use these layers to implement a convolutional and an aggregate CompositeNet. We train our CompositeNets to perform classification and, most remarkably, unsupervised anomaly detection. Our experiments on synthetic and real-world datasets show that, in both tasks, our CompositeNets outperform ConvPoint and achieve similar results as KPConv despite having a much simpler architecture. Moreover, our CompositeNets substantially outperform existing solutions for anomaly detection on point clouds.