 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Dynamic and Kinematic Model Driven Extended Kalman Filters (EKF) for the Localization of Autonomous Underwater Vehicles
Paper and Code
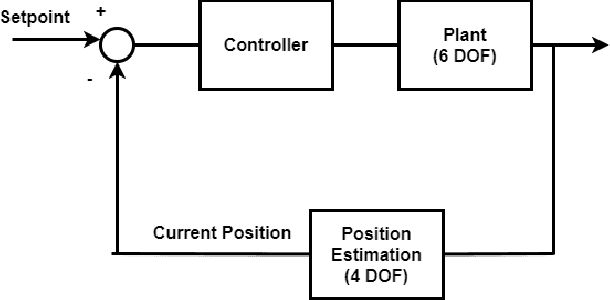
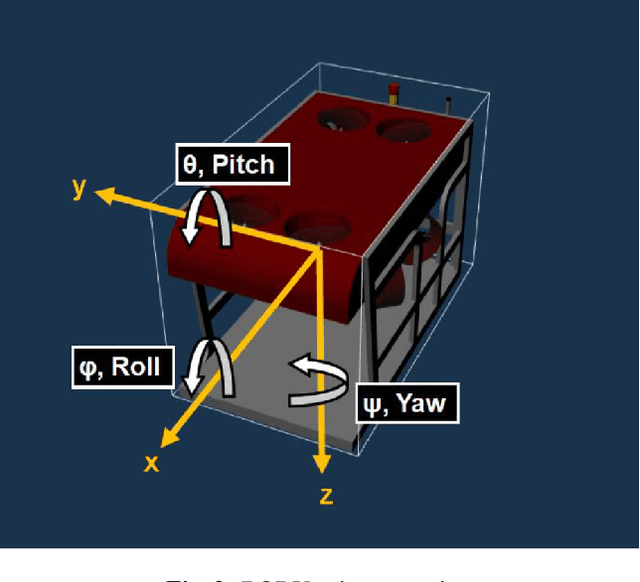
Autonomous Underwater Vehicles (AUVs) and Remotely Operated Vehicles (ROVs) are used for a wide variety of missions related to exploration and scientific research. Successful navigation by these systems requires a good localization system. Kalman filter based localization techniques have been prevalent since the early 1960s and extensive research has been carried out using them, both in development and in design. It has been found that the use of a dynamic model (instead of a kinematic model) in the Kalman filter can lead to more accurate predictions, as the dynamic model takes the forces acting on the AUV into account. Presented in this paper is a motion-predictive extended Kalman filter (EKF) for AUVs using a simplified dynamic model. The dynamic model is derived first and then it was simplified for a RexROV, a type of submarine vehicle used in simple underwater exploration, inspection of subsea structures, pipelines and shipwrecks. The filter was implemented with a simulated vehicle in an open-source marine vehicle simulator called UUV Simulator and the results were compared with the ground truth. The results show good prediction accuracy for the dynamic filter, though improvements are needed before the EKF can be used on real-time. Some perspective and discussion on practical implementation is presented to show the next steps needed for this concept.