Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommuting Conditional GANs for Robust Multi-Modal Fusion
Paper and Code
Jun 24, 2019
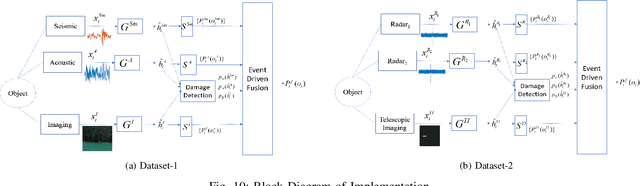
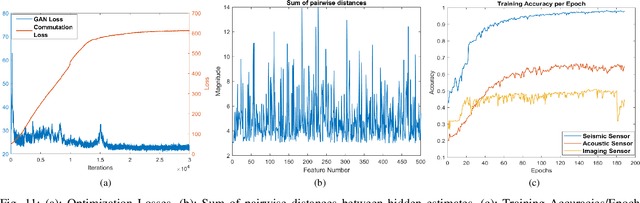

This paper presents a data driven approach to multi-modal fusion, where optimal features for each sensor are selected from a common hidden space between the different modalities. The existence of such a hidden space is then used in order to detect damaged sensors and safeguard the performance of the system. Experimental results show that such an approach can make the system robust against noisy/damaged sensors, without requiring human intervention to inform the system about the damage.
View paper on