 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication- and Computation-Efficient Distributed Decision-Making in Multi-Robot Networks
Paper and Code
Jul 15, 2024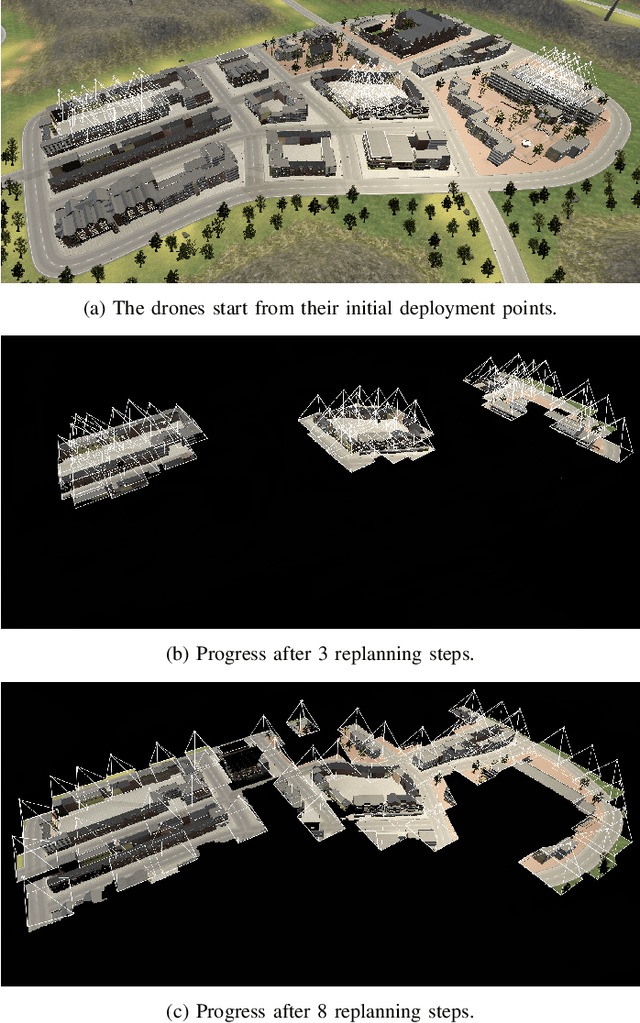
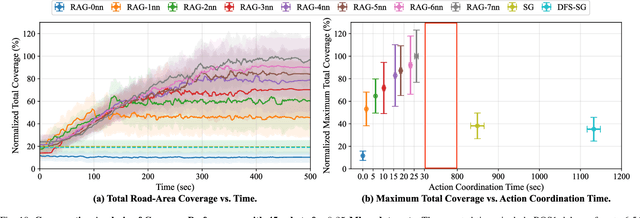
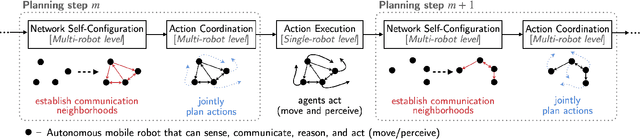
We provide a distributed coordination paradigm that enables scalable and near-optimal joint motion planning among multiple robots. Our coordination paradigm contrasts with current paradigms that are either near-optimal but impractical for replanning times or real-time but offer no near-optimality guarantees. We are motivated by the future of collaborative mobile autonomy, where distributed teams of robots will coordinate via vehicle-to-vehicle (v2v) communication to execute information-heavy tasks like mapping, surveillance, and target tracking. To enable rapid distributed coordination, we must curtail the explosion of information-sharing across the network, thus limiting robot coordination. However, this can lead to suboptimal plans, causing overlapping trajectories instead of complementary ones. We make theoretical and algorithmic contributions to balance the trade-off between decision speed and optimality. We introduce tools for distributed submodular optimization, a diminishing returns property in information-gathering tasks. Theoretically, we analyze how local network topology affects near-optimality at the global level. Algorithmically, we provide a communication- and computation-efficient coordination algorithm for agents to balance the trade-off. Our algorithm is up to two orders faster than competitive near-optimal algorithms. In simulations of surveillance tasks with up to 45 robots, it enables real-time planning at the order of 1 Hz with superior coverage performance. To enable the simulations, we provide a high-fidelity simulator that extends AirSim by integrating a collaborative autonomy pipeline and simulating v2v communication delays.