Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollisionless Pattern Discovery in Robot Swarms Using Deep Reinforcement Learning
Paper and Code
Sep 20, 2022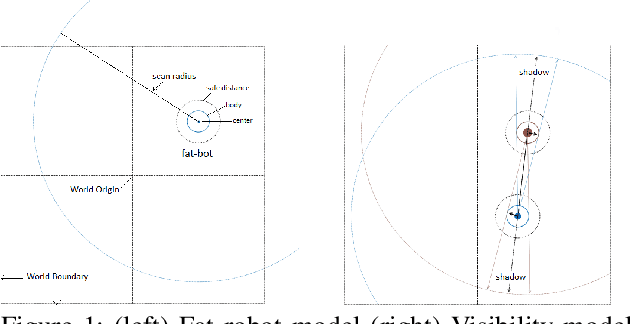
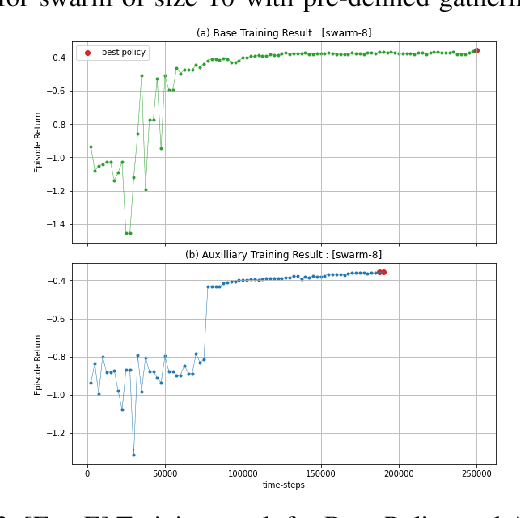
We present a deep reinforcement learning-based framework for automatically discovering patterns available in any given initial configuration of fat robot swarms. In particular, we model the problem of collision-less gathering and mutual visibility in fat robot swarms and discover patterns for solving them using our framework. We show that by shaping reward signals based on certain constraints like mutual visibility and safe proximity, the robots can discover collision-less trajectories leading to well-formed gathering and visibility patterns.
View paper on