 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free Navigation of Wheeled Mobile Robots: An Integrated Path Planning and Tube-Following Control Approach
Paper and Code
Dec 19, 2023
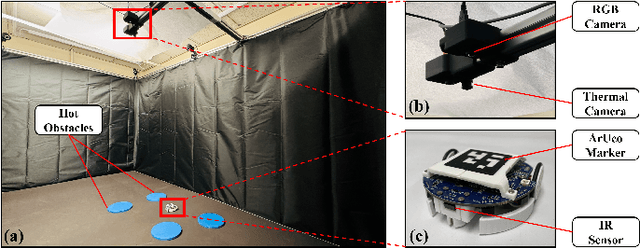


In this paper, an integrated path planning and tube-following control scheme is proposed for collision-free navigation of a wheeled mobile robot (WMR) in a compact convex workspace cluttered with sufficiently separated spherical obstacles. An analytical path planning algorithm is developed based on Bouligand's tangent cones and Nagumo's invariance theorem, which enables the WMR to navigate towards a designated goal location from almost all initial positions in the free space, without entering into augmented obstacle regions with safety margins. We further construct a virtual "safe tube" around the reference trajectory, ensuring that its radius does not exceed the size of the safety margin. Subsequently, a saturated adaptive controller is designed to achieve safe trajectory tracking in the presence of disturbances. It is shown that this tube-following controller guarantees that the WMR tracks the reference trajectory within the predefined tube, while achieving uniform ultimate boundedness of both the position tracking and parameter estimation errors. This indicates that the WMR will not collide with any obstacles along the way. Finally, we report simulation and experimental results to validate the effectiveness of the proposed method.