Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Avoidance of Two Autonomous Quadcopters
Paper and Code
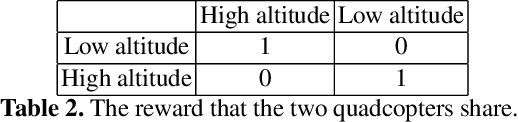

Traffic collision avoidance systems (TCAS) are used in order to avoid incidences of mid-air collisions between aircraft. We present a game-theoretic approach of a TCAS designed for autonomous unmanned aerial vehicles (UAVs). A variant of the canonical example of game-theoretic learning, fictitious play, is used as a coordination mechanism between the UAVs, that should choose between the alternative altitudes to fly and avoid collision. We present the implementation results of the proposed coordination mechanism in two quad-copters flying in opposite directions.
View paper on