 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoGrasp: 6-DoF Grasp Generation for Human-Robot Collaboration
Paper and Code
Oct 06, 2022


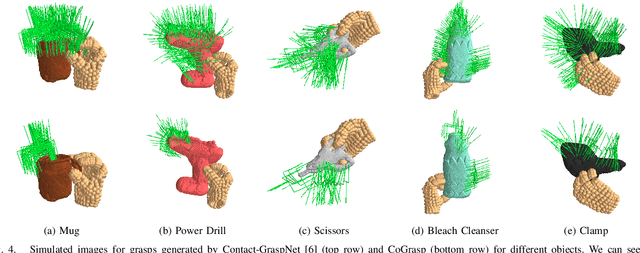
Robot grasping is an actively studied area in robotics, mainly focusing on the quality of generated grasps for object manipulation. However, despite advancements, these methods do not consider the human-robot collaboration settings where robots and humans will have to grasp the same objects concurrently. Therefore, generating robot grasps compatible with human preferences of simultaneously holding an object becomes necessary to ensure a safe and natural collaboration experience. In this paper, we propose a novel, deep neural network-based method called CoGrasp that generates human-aware robot grasps by contextualizing human preference models of object grasping into the robot grasp selection process. We validate our approach against existing state-of-the-art robot grasping methods through simulated and real-robot experiments and user studies. In real robot experiments, our method achieves about 88\% success rate in producing stable grasps that also allow humans to interact and grasp objects simultaneously in a socially compliant manner. Furthermore, our user study with 10 independent participants indicated our approach enables a safe, natural, and socially-aware human-robot objects' co-grasping experience compared to a standard robot grasping technique.