Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOBRA: Data-Efficient Model-Based RL through Unsupervised Object Discovery and Curiosity-Driven Exploration
Paper and Code
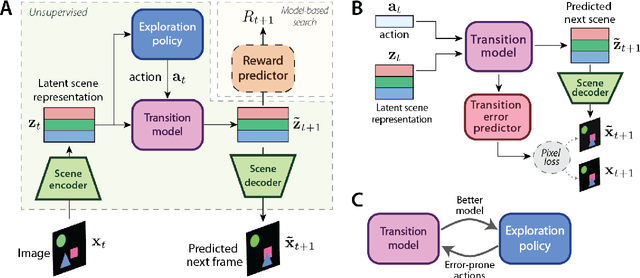
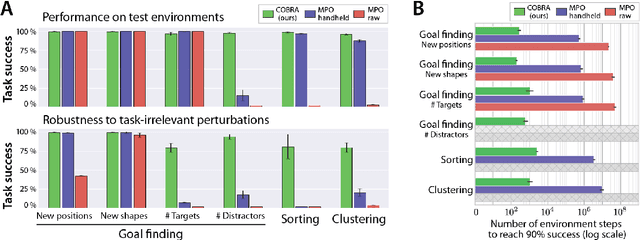
Data efficiency and robustness to task-irrelevant perturbations are long-standing challenges for deep reinforcement learning algorithms. Here we introduce a modular approach to addressing these challenges in a continuous control environment, without using hand-crafted or supervised information. Our Curious Object-Based seaRch Agent (COBRA) uses task-free intrinsically motivated exploration and unsupervised learning to build object-based models of its environment and action space. Subsequently, it can learn a variety of tasks through model-based search in very few steps and excel on structured hold-out tests of policy robustness.
View paper on