 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClustering Social Touch Gestures for Human-Robot Interaction
Paper and Code
Apr 03, 2023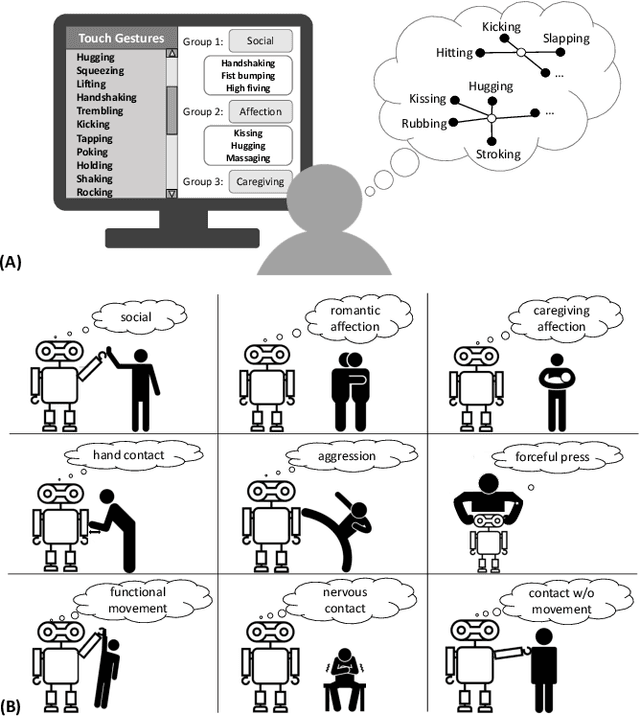
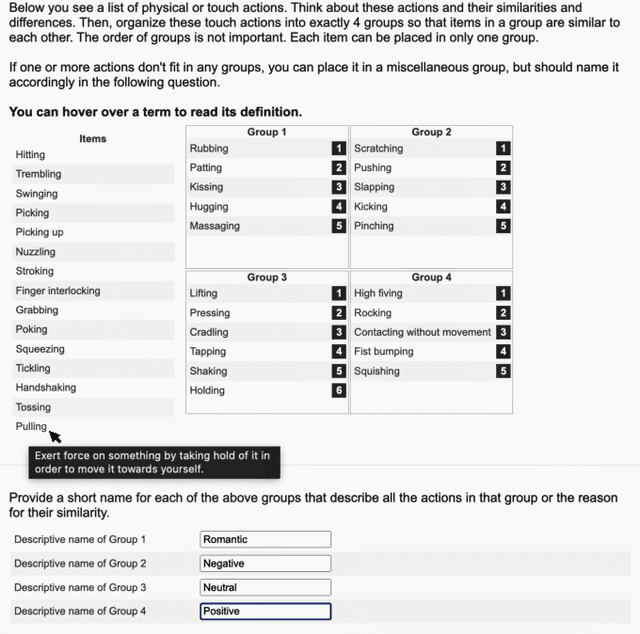
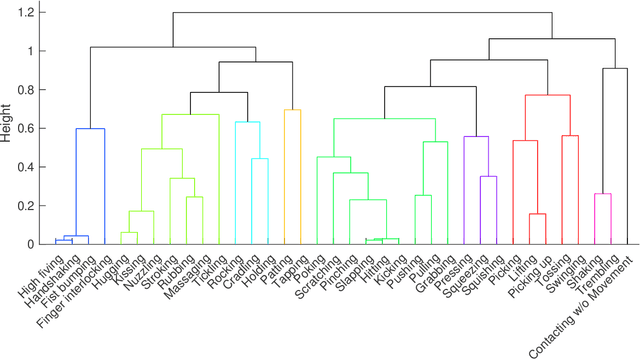
Social touch provides a rich non-verbal communication channel between humans and robots. Prior work has identified a set of touch gestures for human-robot interaction and described them with natural language labels (e.g., stroking, patting). Yet, no data exists on the semantic relationships between the touch gestures in users' minds. To endow robots with touch intelligence, we investigated how people perceive the similarities of social touch labels from the literature. In an online study, 45 participants grouped 36 social touch labels based on their perceived similarities and annotated their groupings with descriptive names. We derived quantitative similarities of the gestures from these groupings and analyzed the similarities using hierarchical clustering. The analysis resulted in 9 clusters of touch gestures formed around the social, emotional, and contact characteristics of the gestures. We discuss the implications of our results for designing and evaluating touch sensing and interactions with social robots.