 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCluster-Wise Ratio Tests for Fast Camera Localization
Paper and Code
May 20, 2017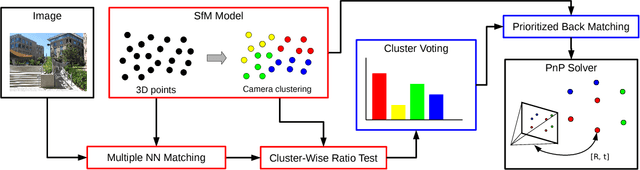
Feature point matching for camera localization suffers from scalability problems. Even when feature descriptors associated with 3D scene points are locally unique, as coverage grows, similar or repeated features become increasingly common. As a result, the standard distance ratio-test used to identify reliable image feature points is overly restrictive and rejects many good candidate matches. We propose a simple coarse-to-fine strategy that uses conservative approximations to robust local ratio-tests that can be computed efficiently using global approximate k-nearest neighbor search. We treat these forward matches as votes in camera pose space and use them to prioritize back-matching within candidate camera pose clusters, exploiting feature co-visibility captured by clustering the 3D model camera pose graph. This approach achieves state-of-the-art camera localization results on a variety of popular benchmarks, outperforming several methods that use more complicated data structures and that make more restrictive assumptions on camera pose. We also carry out diagnostic analyses on a difficult test dataset containing globally repetitive structure that suggest our approach successfully adapts to the challenges of large-scale image localization.